



Bearing-only target tracking based on ellipsoidal outer-bounding set-membership estimation
-
摘要:
针对在未知但有界噪声假设下的双基阵纯方位目标跟踪问题,本文提出了一种基于外定界椭球的集员估计(EOB-SME)跟踪算法。该算法具有类似于Kalman滤波的预测-校正递推更新结构,并且在时间更新和量测更新递推阶段分别有一个加权参数。通过最小化估计误差的Lyapunov函数的上界来求取量测更新递推阶段的加权参数,减少了算法的计算量;同时将非线性系统线性化后所产生的误差用椭球进行外包,与量测噪声椭球组成新的噪声椭球。仿真结果表明:在有界噪声假设下,本文所提出算法对纯方位机动目标的跟踪精度更高。
Abstract:For the problem of bearing-only maneuvering target tracking under the unknown-but-bounded noises, this paper proposes an ellipsoidal outer-bounding set-membership estimation (EOB-SME) algorithm. The EOB-SME algorithm has a prediction-correction structure in time update and observation update, which is similar to Kalman filter. For each update, there is a data-depending weighting factor. The observation weighting factor is computed by minimizing the upper bound on a Lyapunov function of the estimation error and the computation load is decreased. The linearization errors of nonlinear observation equation are bounded by an ellipsoid which is combined with the ellipsoid of observation noise to form a new ellipsoid of observation noise. The simulation results show that the proposed algorithm has higher tracking accuracy for bearing-only maneuvering target under the assumption of unknown-but-bounded noise.
-

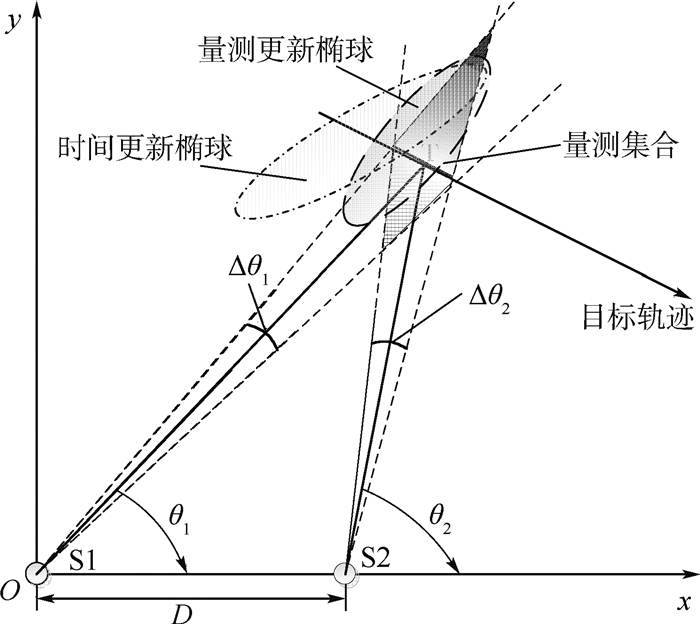
图 1 未知但有界噪声下双基阵纯方位机动目标跟踪
Figure 1. Bearing-only maneuvering target tracking with two sensors under unknown-but-bounded noises

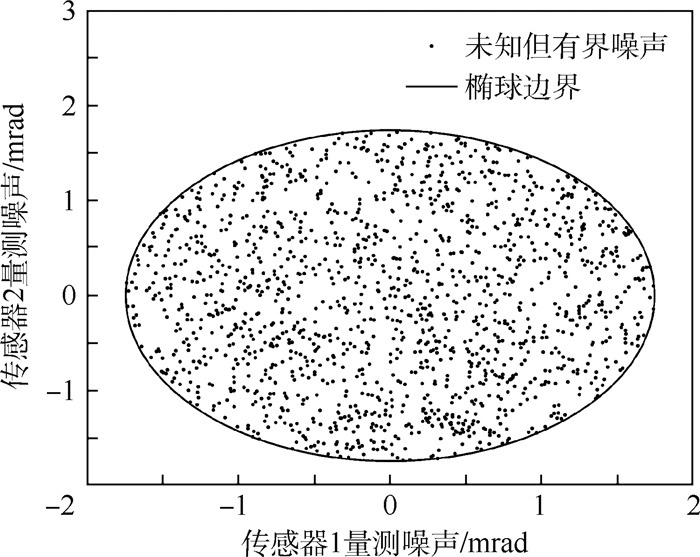
图 2 双基阵纯方位测量下的量测更新过程
Figure 2. Observation update process under bearing-only measurement with two sensors

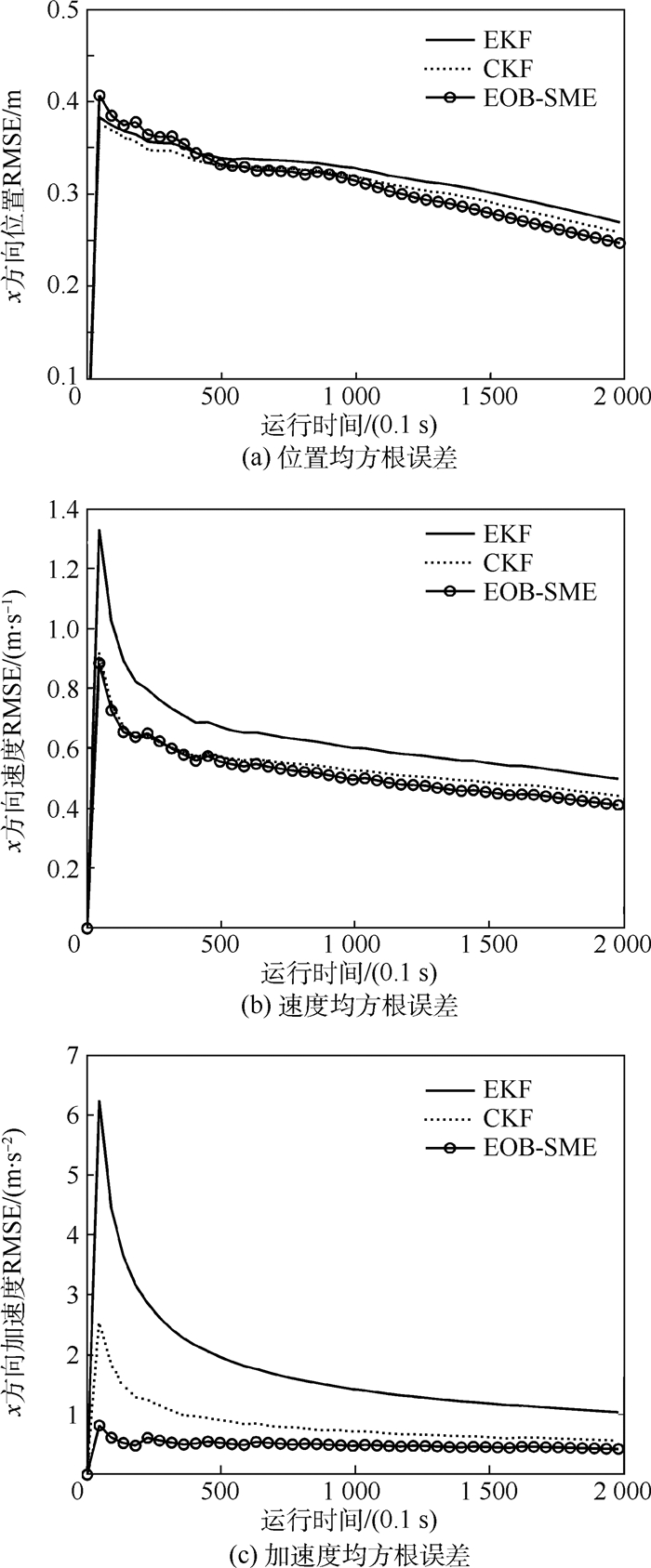
图 5 不同算法对目标在x方向上的位置、速度和加速度均方根误差曲线
Figure 5. Position, velocity and acceleration root mean square error curves of target in the x direction for different algorithms

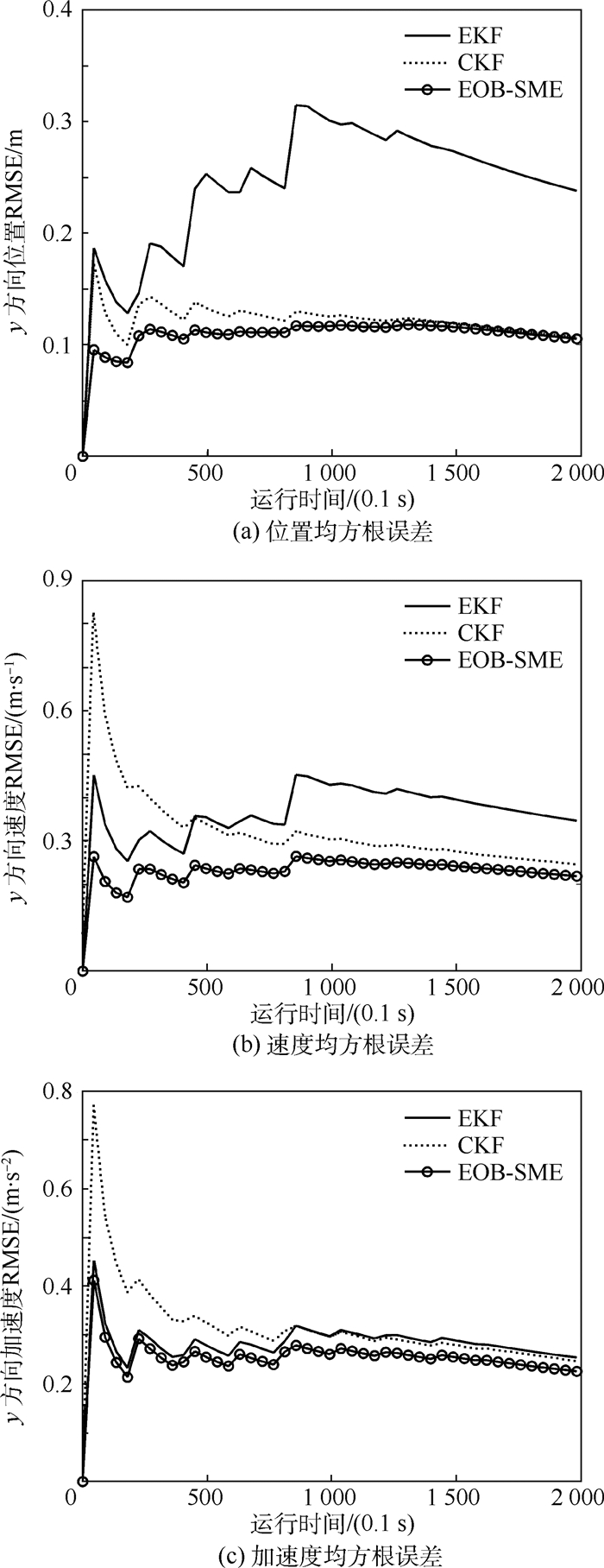
图 6 不同算法对目标在y方向上的位置、速度和加速度均方根误差曲线
Figure 6. Position, velocity and acceleration root mean square error curves of target in the y direction for different algorithms
表 1 目标状态估计的平均均方根误差
Table 1. Average RMSE of target state estimation
算法 位置/m 速度/(m·s-1) 加速度/(m·s-2) x方向 y方向 x方向 y方向 x方向 y方向 EKF 0.334 0.267 0.752 0.370 2.983 0.415 CKF 0.324 0.141 0.610 0.374 0.999 0.314 EOB-SME 0.329 0.121 0.567 0.272 0.550 0.284  下载: 导出CSV
下载: 导出CSV
表 2 每次递推更新的算法平均运行时间
Table 2. Average run time at each recursive update step for different algorithmsms
ms 算法 EKF CKF EOB-SME 运行时间 0.207 2.343 0.791
下载: 导出CSV
-
[1] 刘忠, 周丰, 石章松, 等.纯方位目标运动分析[M].北京:国防工业出版社, 2009:4.LIU Z, ZHOU F, SHI Z S, et al.Bearing-only target motion analysis[M].Beijng:National Defense Industry Press, 2009:4(in Chinese). [2] BAR-SHALOM Y, LI X R, KIRUBARAJAN T. Estimation with application to tracking and navigation[M].New York:John Wiley & Sons, Inc, 2001:9. [3] 胡科强, 袁志勇, 周浩.双基阵纯方位被动定位跟踪方法[J].舰船科学技术, 2012, 34(5):83-86. http://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201205019.htmHU K Q, YUAN Z Y, ZHOU H.Methods on the performance of bearing-only target tracking based two arrays[J].Ship Science and Technolgy, 2012, 34(5):83-86(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201205019.htm [4] 徐本连. 双 (多) 基纯方位目标定位跟踪算法研究[D]. 南京: 南京理工大学, 2006: 1-4.XU B L.The algorithm study on bearings-only target localization and tracking using two or more observer[D].Nanjing:Nanjing University of Science and Technology, 2006:1-4(in Chinese). [5] XU B L, CHEN Q L, WU Z Y, et al.Analysis and approximation of performance bound for two-observer bearings-only tracking[J].Information Sciences, 2008, 178(8):2059-2078. doi: 10.1016/j.ins.2007.12.004 [6] 吴卫华, 江晶, 范雄华, 等.WGS-84坐标系下双机纯角度无源定位及性能分析[J].红外与激光工程, 2015, 44(2):654-661. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201502046.htmWU W H, JIANG J, FAN X H, et al.Performance analysis of passive location by two airborne platforms with angle-only measurements in WGS-84[J].Infrared and Laser Engineering, 2015, 44(2):654-661(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201502046.htm [7] 冉华明, 周锐, 吴江, 等.双机协同无源目标跟踪轨迹优化[J].北京航空航天大学学报, 2015, 41(1):160-166. http://bhxb.buaa.edu.cn/CN/abstract/abstract13140.shtmlRAN H M, ZHOU R, WU J, et al.Trajectory optimization of two air crafts in collaborative passive target tracking[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(1):160-166(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13140.shtml [8] 任波, 闫向远.纯角度跟踪非线性预测滤波算法研究[J].弹箭与制导学报, 2014, 34(2):6-8. http://www.cnki.com.cn/Article/CJFDTOTAL-DJZD201402002.htmREN B, YAN X Y.Bearing-only tracking nonlinear prediction filter algorithm research[J].Journal of Projectiles, Rockets, Missiles and Guidance, 2014, 34(2):6-8(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DJZD201402002.htm [9] 许兆鹏, 韩树平.一种双基阵纯方位机动目标被动跟踪方法[J].舰船科学技术, 2012, 34(11):100-103. http://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201211021.htmXU Z P, HAN S P.Research on an algorithm for passive tracking of maneuvering target based on two arrays bearings[J].Ship Science and Technolgy, 2012, 34(11):100-103(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JCKX201211021.htm [10] JAUFFRET C, PILLON D, PIGNOL A C.Bearings-only maneuvering target motion analysis from a nonmaneuvering platform[J].IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4):1934-1949. doi: 10.1109/TAES.2010.5595605 [11] AIDALA V J.Kalman filter behavior in bearings-only tracking application[J].IEEE Transactions on Aerospace and Electronic Systems, 1979, 15(1):29-39. http://ieeexplore.ieee.org/document/4102101/ [12] 鹿传国, 冯新喜, 张迪.基于改进容积卡尔曼滤波的纯方位目标跟踪[J].系统工程与电子技术, 2012, 34(1):28-33. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201201005.htmLU C G, FENG X X, ZHANG D.Pure bearing tracking based on improved cubature Kalman filter[J].Systems Engineering and Electronics, 2012, 34(1):28-33(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201201005.htm [13] LEONG P H, ARULAMPALAM S, LAMAHEWA T A, et al.A Gaussian-sum based cubature Kalman filter for bearing-only[J].IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(2):1161-1176. doi: 10.1109/TAES.2013.6494405 [14] 方君, 戴邵武, 许文明, 等.基于ST-SRCKF的超高速强机动目标跟踪算法[J].北京航空航天大学学报, 2016, 42(8):1698-1708. http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtmlFANG J, DAI S W, XU W M, et al.Highly maneuvering hypervelocity-target tracking algorithm based on ST-SRCKF[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8):1698-1708(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtml [15] 陈辉, 韩崇昭.纯方位距离参数化概率假设密度和势概率假设密度滤波器[J].控制理论与应用, 2015, 32(5):579-590. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201505002.htmCHEN H, HAN C Z.Bearings-only range-parameterized probability hypothesis density and cardinalized probability hypothesis density filter[J].Control Theory and Applications, 2015, 32(5):579-590(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201505002.htm [16] 孔云波, 冯新喜, 鹿传国, 等.改进高斯混合粒子滤波的纯方位目标跟踪算法[J].宇航学报, 2012, 33(7):971-977. http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201207018.htmKONG Y B, FENG X X, LU C G, et al.An improved Gaussian mixture particle filter based targets tracking algorithm for bearing-only tracking system[J].Journal of Astronautics, 2012, 33(7):971-977(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YHXB201207018.htm [17] 李银伢, 谭维茜, 盛安冬.改进型粒子滤波算法在多站纯方位被动跟踪中的应用[J].控制理论与应用, 2011, 28(8):1081-1086. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201108005.htmLI Y Y, TAN W Q, SHENG A D.Application of improved particle filter algorithm to bearings-only passive tracking in multiple stations[J].Control Theory and Applications, 2011, 28(8):1081-1086(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201108005.htm [18] SCHWEPPE F C.Recursive state estimation unknown but bounded errors and system inputs[J].IEEE Transactions on Automatic Control, 1968, 13(1):22-28. doi: 10.1109/TAC.1968.1098790 [19] 孙先仿, 王世纪, 张海.扩展集员滤波在捷联惯导大方位失准角初始对准中的应用[J].中国惯性技术学报, 2008, 16(5):505-508. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200805002.htmSUN X F, WANG S J, ZHANG H.Application of extended set-membership filter in SINS initial alignment of large azimuth misalignment[J].Journal of Chinese Inertial Technology, 2008, 16(5):505-508(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGXJ200805002.htm [20] 江涛, 钱富才.基于ESMF算法的GPS信号多普勒频率估计[J].控制与决策, 2016, 31(2):378-384. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201602027.htmJIANG T, QIAN F C.Estimated Doppler frequency of GPS signal based on ESMF[J].Control and Decision, 2016, 31(2):378-384(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201602027.htm [21] 宋大雷, 吴冲, 齐俊桐, 等.基于MIT规则的自适应扩展集员估计方法[J].自动化学报, 2012, 38(11):1847-1860. doi: 10.3724/SP.J.1004.2012.01847SONG D L, WU C, QI J T, et al.A MIT-based nonlinear adaptive set-membership filter for ellipsoidal estimation[J].Acta Automatica Sinica, 2012, 38(11):1847-1860(in Chinese). doi: 10.3724/SP.J.1004.2012.01847 [22] MAKSAROV D G, NORTON J P.State bounding with ellipsoidal set description of the uncertainty[J].International Journal of Control, 1996, 65(5):847-866. doi: 10.1080/00207179608921725 [23] SCHOLTE E, CAMPBELL M E.A nonlinear set-membership filter for on-line applications[J].International Journal of Robust and Nonlinear Control, 2003, 13(15):1337-1358. doi: 10.1002/(ISSN)1099-1239 [24] ZHOU B, HAN J D, LIU G J.A UD factorization-based nonlinear adaptive set-membership filter for ellipsoidal estimation[J].International Journal of Robust and Nonlinear Control, 2008, 18(16):1513-1531. doi: 10.1002/rnc.v18:16 [25] LIU Y S, ZHAO Y, WU F L.Ellipsoidal state-bounding-based set-membership estimation for linear system with unknown-but-bounded disturbances[J].IET Control Theory and Applications, 2016, 10(4):431-442. doi: 10.1049/iet-cta.2015.0654 [26] FLETCHER K F, ARULAMPALAM S M, EVANS J R, et al.Ellipsoidal set based tracking with nonlinear measurements[J].IEE Proceeding-Radar, Sonar and Navigation, 2005, 152(5):335-344. doi: 10.1049/ip-rsn:20045108 [27] RAHMATI H, KHALOOZADEH H, AYATI M.Maneuvering target tracking method based on unknown but bounded uncertainties[C]//18th IFAC World Congress.Milano:IFAC Press, 2011:4290-4295. [28] LIU Y S, ZHAO Y.Ellipsoidal set filter combined set-membership and statistics uncertainties for bearing-only maneuvering target tracking[C]//IEEE/ION Position Lacation and Navigation Symposium.Piscataway, NJ:IEEE Press, 2014:753-759. -

 下载:
下载:

 点击查看大图
点击查看大图

计量
- 文章访问数: 1016
- HTML全文浏览量: 71
- PDF下载量: 498
- 被引次数: 0
