



Cooperative attitude control on SO(3) for multiple spacecraft with time-varying gain ESO
-
摘要:
针对多航天器姿态协同控制问题,基于特殊正交群(SO(3))研究了存在干扰情形下的控制设计方法。结合有向通信拓扑建立了多航天器SO(3)模型,在此模型的基础上提出了一种时变增益扩张状态观测器(ESO)对系统的总干扰进行估计,削弱了常值增益ESO的峰化现象。利用相邻航天器的信息给出了旋转矩阵形式的协同指令,进一步基于SO(3)方法设计了协同控制器。同时采用ESO的输出在所设计的控制器中对系统的干扰进行补偿,从理论上给出了ESO的收敛性以及闭环系统的稳定性证明,保证多航天器系统能够实现稳定协同。仿真结果验证了本文方法的有效性和快速性。
-
关键词:
- 多航天器 /
- 协同控制 /
- 扩张状态观测器(ESO) /
- 时变增益 /
- 特殊正交群(SO(3))
Abstract:This paper is concerned with the cooperative attitude control of multiple spacecraft, and the control design method on special orthogonal group (SO(3)) with disturbance is studied. The multiple spacecraft system is modeled using SO(3) method and directed communication topology. Then, a time-varying gain extended state observer (ESO) is proposed to estimate the total disturbance in the system, and it lessens the peaking phenomenon. The control commands are formulated in the form of rotation matrices using the information of adjacent spacecraft. Thus, the cooperative controller based on SO(3) method is designed, and at the same time ESO output is used to compensate the disturbance on the system. The convergence of the ESO and the stability of the closed-loop system are analyzed in this paper, which shows that the attitudes of the multiple spacecraft could reach stable consensus. Simulation is conducted to verify the effectiveness of the proposed method.
-

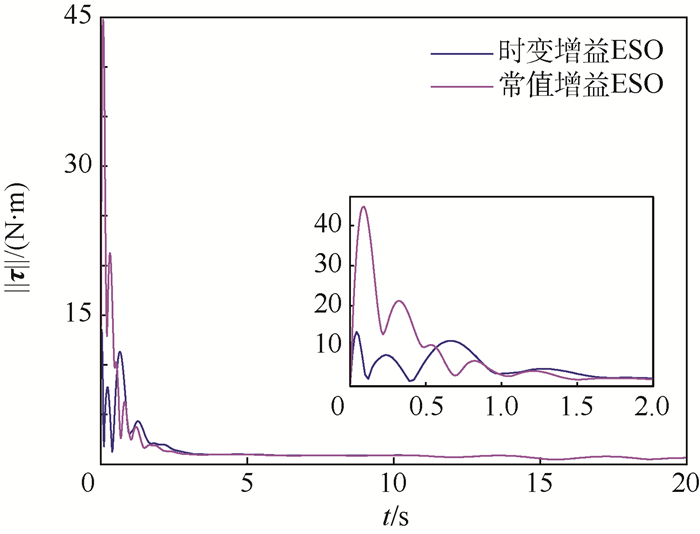
图 3 考虑干扰补偿的控制力矩(航天器4)
Figure 3. Control moment with disturbance compensation (Spacecraft 4)
表 1 航天器初始条件和参数
Table 1. Initial conditions and parameters of spacecraft
航天器 不确定性
ΔJi/(kg·m2)俯仰角/
(°)偏航角/
(°)滚转角/
(°)1 
50 30 10 2 
15 10 20 3 
0 -10 40 4 
5 -8 20 5 
-10 0 10  下载: 导出CSV
下载: 导出CSV
-
[1] 张保群, 宋申民, 陈兴林.考虑控制饱和的编队飞行卫星姿态协同控制[J].宇航学报, 2011, 32(5):1060-1069. doi: 10.3873/j.issn.1000-1328.2011.05.015ZHANG B Q, SONG S M, CHEN X L.Attitude coordination control of formation flying satellites under control saturation[J].Journal of Astronautics, 2011, 32(5):1060-1069(in Chinese). doi: 10.3873/j.issn.1000-1328.2011.05.015 [2] 胡勇, 徐李佳, 解永春.针对失控翻滚目标航天器的交会对接控制[J].宇航学报, 2015, 36(1):47-57. doi: 10.3873/j.issn.1000-1328.2015.01.007HU Y, XU L J, XIE Y C.Control for rendezvous and docking with a tumbling target spacecraft[J].Journal of Astronautics, 2015, 36(1):47-57(in Chinese). doi: 10.3873/j.issn.1000-1328.2015.01.007 [3] 王有亮, 李明涛, 郑建华, 等.编队卫星法向机动的切向耦合效应补偿方法[J].北京航空航天大学学报, 2017, 43(6):1165-1172. http://bhxb.buaa.edu.cn/CN/abstract/abstract14086.shtmlWANG Y L, LI M T, ZHENG J H, et al.Compensation method of in-track coupling effect of cross-track maneuver for formation-flying satellites[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6):1165-1172(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14086.shtml [4] ZHANG K W, DEMETRIOU M A.Adaptation and optimization of the synchronization gains in the adaptive spacecraft attitude synchronization[J].Aerospace Science and Technology, 2015, 46:116-123. doi: 10.1016/j.ast.2015.06.002 [5] RAN D C, CHEN X Q, MISRA A K, et al.Relative position coordinated control for spacecraft formation flying with communication delays[J].Acta Astronautica, 2017, 137:302-311. doi: 10.1016/j.actaastro.2017.04.011 [6] 连克非, 董云峰.电磁航天器编队位置跟踪自适应协同控制[J].北京航空航天大学学报, 2017, 43(10):2154-2162. http://bhxb.buaa.edu.cn/CN/abstract/abstract14213.shtmlLIAN K F, DONG Y F.Adaptive cooperative control for electromagnetic spacecraft formation flight position tracking[J].Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10):2154-2162(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14213.shtml [7] THAKUR D, SRIKANT S, AKELLA M R.Adaptive attitude-tracking control of spacecraft with uncertain time-varying inertia parameters[J].Journal of Guidance, Control, and Dynamics, 2014, 38(1):41-52. doi: 10.2514/1.G000457 [8] ZHANG H, FANG J.Robust backstepping control for agile sa-tellite using double-gimbal variable-speed control moment gyroscope[J].Journal of Guidance, Control, and Dynamics, 2013, 36(5):1356-1363. doi: 10.2514/1.59327 [9] LU K F, XIA Y Q, ZHU Z, et al.Sliding mode attitude tracking of rigid spacecraft with disturbances[J].Journal of the Franklin Institute, 2012, 349(2):413-440. doi: 10.1016/j.jfranklin.2011.07.019 [10] HUANG D, WANG Q, DUAN Z.Distributed attitude control for multiple flexible spacecraft under actuator failures and saturation[J].Nonlinear Dynamics, 2017, 88(1):529-546. doi: 10.1007/s11071-016-3258-3 [11] 王青, 龚立纲, 董朝阳.基于时变增益ESO的航天器无源姿态跟踪控制[J].控制与决策, 2018, 33(2):193-202. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201802001WANG Q, GONG L G, DONG C Y.Passive attitude tracking control of spacecraft based on time-varying gain ESO[J].Control and Decision, 2018, 33(2):193-202(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201802001 [12] 何朕, 王广雄.姿态控制中的散开现象[J].机电与控制学报, 2015, 19(7):101-105. http://d.old.wanfangdata.com.cn/Periodical/djykzxb201507015HE Z, WANG G X.Unwinding phenomenon in attitude control[J].Electric Machines and Control, 2015, 19(7):101-105(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/djykzxb201507015 [13] SANYAL A, FOSBURY A, CHATURVEDI N, et al.In-ertia-free spacecraft attitude tracking with disturbance rejection and almost global stabilization[J].Journal of Guidance, Control, and Dynamics, 2009, 32(4):1167-1178. doi: 10.2514/1.41565 [14] LEE T.Exponential stability of an attitude tracking control system on SO(3) for large-angle rotational maneuvers[J].Systems and Control Letters, 2012, 61(1):231-237. doi: 10.1016/j.sysconle.2011.10.017 [15] 郑重, 宋申民.基于旋转矩阵描述的航天器无角速度测量姿态跟踪无源控制[J].控制与决策, 2014, 29(9):1628-1632. http://d.old.wanfangdata.com.cn/Periodical/kzyjc201409015ZHENG Z, SONG S M.Rotation matrix based passive attitude tracking control of spacecraft without angular velocity measurements[J].Control and Decision, 2014, 29(9):1628-1632(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/kzyjc201409015 [16] LEE T.Global exponential attitude tracking controls on SO(3)[J].IEEE Transactions on Automatic Control, 2015, 60(10):2837-2842. doi: 10.1109/TAC.2015.2407452 [17] 董晓光, 曹喜滨, 张锦绣, 等.卫星编队飞行的鲁棒自适应控制方法[J].自动化学报, 2013, 39(2):132-141. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201300099807DONG X G, CAO X B, ZHANG J X, et al.A robust adaptive control law for satellite formation flying[J].Acta Automatica Sinica, 2013, 39(2):132-141(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=QK201300099807 [18] 李冬柏, 解延浩, 吴宝林.考虑执行器安装偏差的航天器姿态跟踪控制[J].宇航学报, 2017, 38(6):598-604. http://d.old.wanfangdata.com.cn/Periodical/yhxb201706006LI D B, XIE Y H, WU B L.Robust spacecraft attitude tracking control with actuator misalignments[J].Journal of Astronautics, 2017, 38(6):598-604(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201706006 [19] GUO B Z, ZHAO Z L.On convergence of non-linear extended state observer for multi-input multi-output systems with uncertainty[J].IET Control Theory & Applications, 2012, 6(15):2375-2386. http://ieeexplore.ieee.org/document/6397128/ [20] GUO B Z, WU Z H, ZHOU H C.Active disturbance rejection control approach to output-feedback stabilization of a class of uncertain nonlinear systems subject to stochastic disturbance[J].IEEE Transactions on Automatic Control, 2016, 61(6):1613-1618. doi: 10.1109/TAC.2015.2471815 [21] TAN W, FU C.Linear active disturbance-rejection control:Analysis and tuning via IMC[J].IEEE Transactions on Industrial Electronics, 2016, 63(4):2350-2359. http://ieeexplore.ieee.org/document/7347404/ [22] 杨明, 董晨, 王松艳, 等.基于有限时间输出反馈的线性扩张状态观测器[J].自动化学报, 2015, 41(1):59-66. http://d.old.wanfangdata.com.cn/Periodical/zdhxb201501006YANG M, DONG C, WANG S Y, et al.Linear extended state observer based on finite-time output feedback[J].Acta Automatica Sinica, 2015, 41(1):59-66(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/zdhxb201501006 [23] CHANG X, LI Y, ZHANG W, et al.Active disturbance rejection control for a flywheel energy storage system[J].IEEE Transactions on Industrial Electronics, 2015, 62(2):991-1001. doi: 10.1109/TIE.2014.2336607 [24] KHALIL H K, PRALY L.High-gain observers in nonlinear feedback control[J].International Journal of Robust and Nonlinear Control, 2014, 24(6):993-1015. doi: 10.1002/rnc.v24.6 [25] PU Z Q, YUAN R Y, YI J Q, et al.A class of adaptive extended state observers for nonlinear disturbed systems[J].IEEE Transa-ctions on Industrial Electronics, 2015, 62(9):5858-5869. doi: 10.1109/TIE.2015.2448060 [26] 邵龙飞, 师鹏, 赵育善.电磁航天器编队动力学建模与运动规划方法[J].北京航空航天大学学报, 2015, 41(4):738-743. http://bhxb.buaa.edu.cn/CN/abstract/abstract13229.shtmlSHAO L F, SHI P, ZHAO Y S.Dynamics modeling and motion programming for electromagnetic formation flight[J].Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(4):738-743(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13229.shtml [27] LEE H C, CHOI J W.Linear time-varying eigenstructure assignment with flight control application[J].IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1):145-157. doi: 10.1109/TAES.2004.1292149 -

 下载:
下载:



 点击查看大图
点击查看大图

计量
- 文章访问数: 905
- HTML全文浏览量: 145
- PDF下载量: 287
- 被引次数: 0
