



Sliding mode control algorithm with high-precision position tracking based on adaptive gain schedule
-
摘要:
影响位置跟踪精度最重要的因素之一是系统不可避免地存在内外不确定性。由于具备很强的鲁棒性,滑模控制能有效消除系统不确定性的影响,然而也会带来抖振这一顽疾。因此,有效削弱滑模控制系统的抖振是提升系统跟踪精度的关键。为此,本文提出一种误差主导的自适应增益调度算法,该算法利用等效原理准确判断系统滑动模态是否建立,并以此来调度切换函数增益值的增减;同时,为克服因利用低通滤波器获取切换函数等效输出而引起的时间延迟,在增益调度中采用误差主导的增益变化率,确保了增益调度的实时性。理论和仿真实验证明,在滑动模态建立前,该增益调度策略能加快滑模变量的收敛速度;而在滑动模态建立后,该增益调度策略能使增益值在有限时间内趋近于系统不确定的绝对值,降低了系统抖振幅值,从而获取更高的跟踪精度。直流力矩电机伺服系统位置跟踪对比实验结果表明,该增益调度方案有效,能使系统获得更高的跟踪精度。
Abstract:One of the most important factors to depress the accuracy of position tracking is the internal and external uncertainties always existing in the system. Due to its strong robustness, sliding mode control can effectively eliminate the impact of uncertainties yet with the trouble named chattering. Therefore, reducing the chattering is the key to improve the accuracy of position tracking in sliding mode control system. This paper proposes an error guided adaptive gain schedule, in which the equivalent principle is employed to schedule the gain by judging whether the sliding mode is established or not. Furthermore, the changing rate of the gain is guided by the tracking error; hence the response speed can be improved by reducing the time lag produced by the low pass filter which is used to obtain the equivalent output of switching function. Theory proof and simulation results show that the gain schedule can accelerate convergence of sliding variable before sliding mode is built, and then after sliding mode is built, it can reduce the chattering by decreasing the value of gain to be close to the absolute value of uncertainty in finite time so as to improve the tracking accuracy. Moreover, the comparative experiment results of position tracking on DC torque motor servo system display that the proposed algorithm is advantageous to obtain higher tracking accuracy by scheduling the gain of switching function appropriately.
-

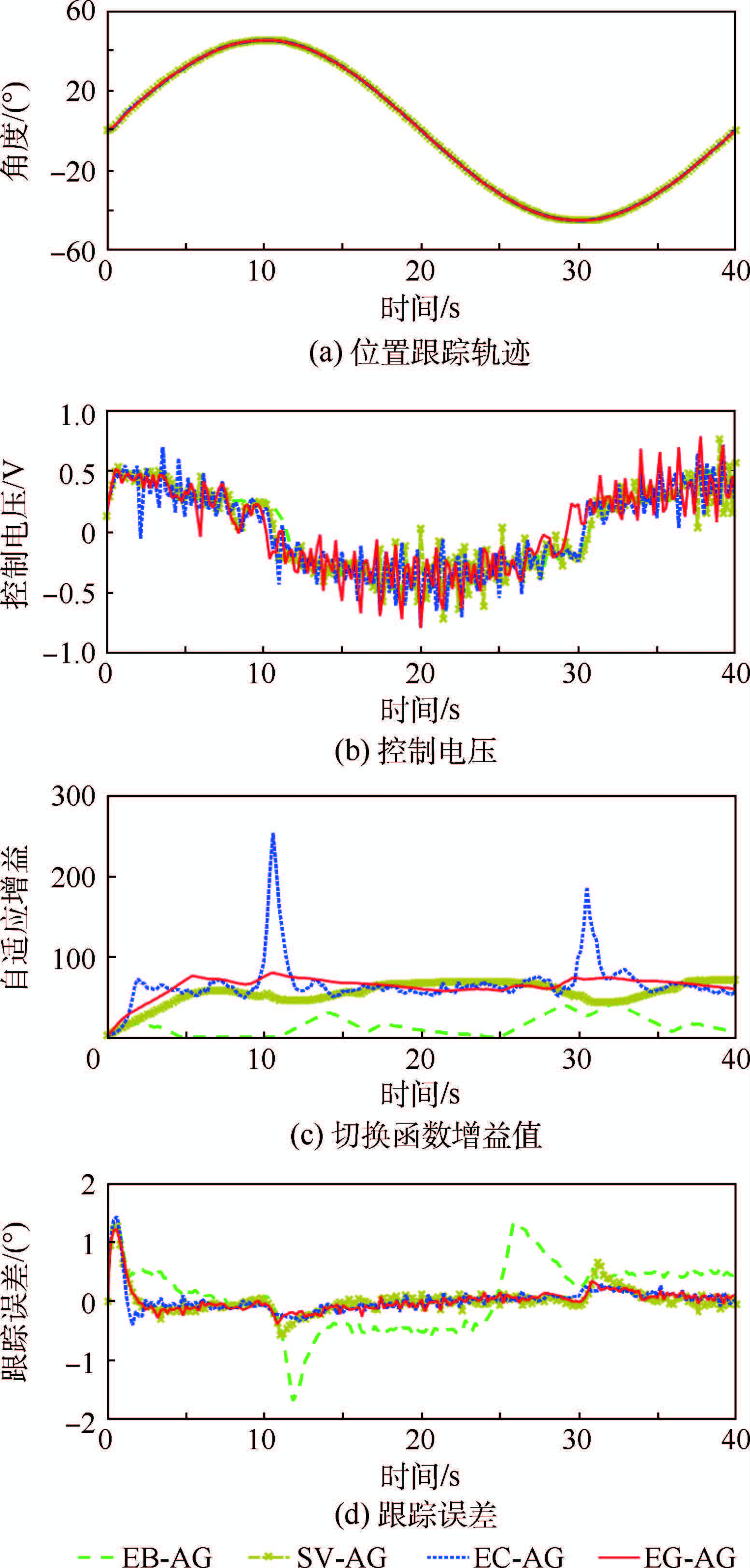
图 1 不同自适应增益调度算法抗扰对比仿真结果
Figure 1. Comparative simulation results on resisting disturbance with different adaptive gain schedule algorithms

图 2 光电跟踪实验平台硬件架构
Figure 2. Hardware architecture of photoelectric trackingexperimental platform
-
[1] 肖启明,杨明,刘可述,等.PMSM伺服系统速度环PI控制器参数自整定及优化[J].电机与控制学报,2014,18(2):102-108. http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201402017.htmXIAO Q M,YANG M,LIU K S,et al.Parameters self-tuning and optimization of speed PI controller for PMSM servo system[J].Electric Machines and Control,2014,18(2):102-108(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DJKZ201402017.htm [2] 邓昌奇,廖辉.基于前馈控制的交流伺服系统精确定位的研究[J].武汉大学学报(工学版),2013,46(3):405-409. http://www.cnki.com.cn/Article/CJFDTOTAL-WSDD201303026.htmDENG C Q,LIAO H.Research on accurate positionting of AC servo system based on feed-forward control[J].Engineering Journal of Wuhan University,2013,46(3):405-409(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-WSDD201303026.htm [3] 符慧,左月飞,刘闯,等.永磁同步电机转速环的一种变结构PI控制器[J].电工技术学报,2015,30(12):237-243. http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201512029.htmFU H,ZUO Y F,LIU C,et al.A variable structure PI controller for permanent magnetic synchronous motor speed-regulation system[J].Transactions of China Electrotechnical Society,2015,30(12):237-243(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201512029.htm [4] 左韬,黄海波,肖永军.基于自校正控制的空间光通信精跟踪系统设计[J].仪器仪表学报,2012,33(5):1181-1187. http://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201205033.htmZUO T,HUANG H B,XIAO Y J.Fine tracking system design of space optical communication based on self-tuning control[J].Chinese Journal of Scientific Instrument,2012,33(5):1181-1187(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-YQXB201205033.htm [5] ZHANG Z,YAN P,JIANG H,et al.A discrete time-varying internal model-based approach for high precision tracking of a multi-axis servo gantry[J].ISA Transactions,2014,53(5):1695-1703. doi: 10.1016/j.isatra.2014.04.006 [6] 闫鹏,张震,郭雷,等.超精密伺服系统控制与应用[J].控制理论与应用,2014,31(10):1338-1352. http://youxian.cnki.com.cn/yxdetail.aspx?filename=KZLY20141031006&dbname=CAPJ2014YAN P,ZHANG Z,GUO L,et al.Control and application of ultra high precision mechatronics[J].Control Theory & Applications,2014,31(10):1338-1352(in Chinese). http://youxian.cnki.com.cn/yxdetail.aspx?filename=KZLY20141031006&dbname=CAPJ2014 [7] 夏运霞,包启亮,李锦英.光电跟踪系统视轴稳定的鲁棒内模控制器设计[J].控制与决策,2013,28(7):1117-1121. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201307034.htmXIA Y X,BAO Q L,LI J Y.Design of robustness internal model controller for line of sight of photoelectric tracking system[J].Control and Decision,2013,28(7):1117-1121(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201307034.htm [8] 王秋平,左玲.光电跟踪系统双内模控制研究[J].东北电力大学学报,2014,34(2):76-82. http://www.cnki.com.cn/Article/CJFDTOTAL-DBDL201402016.htmWANG Q P,ZUO L.The research of dual internal model control applied to electro-optical tracking systems[J].Journal of Northeast Dianli University,2014,34(2):76-82(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DBDL201402016.htm [9] 高志强.自抗扰控制思想探究[J].控制理论与应用,2013,30(12):1498-1510. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201312006.htmGAO Z Q.On the foundation of active disturbance rejection control[J].Control Theory & Applications,2013,30(12):1498-1510(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201312006.htm [10] 付永领,龙满林,郭栋,等.自抗扰控制技术在转台频响伺服中的应用[J].北京航空航天大学学报,2013,39(4):432-437. http://bhxb.buaa.edu.cn/CN/abstract/abstract12576.shtmlFU Y L,LONG M L,GUO D,et al.Application of ADRC technology in simulator frequency response servo[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(4):432-437(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12576.shtml [11] 叶镭,夏元清,付梦印,等.无人炮塔炮控系统自抗扰控制[J].控制理论与应用,2014,31(11):1580-1589. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201411020.htmYE L,XIA Y Q,FU M Y,et al.Active disturbance rejection control for gun control system of unmanned turret[J].Control Theory & Applications,2014,31(11):1580-1589(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201411020.htm [12] 陈兴林,刘川,武志鹏.精密运动平台线性自抗扰控制[J].中南大学学报(自然科学版),2013,44(8):3210-3216. http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201308019.htmCHEN X L,LIU C,WU Z P.Linear active disturbance rejection control used in precision motion platform[J].Journal of Central South University(Science and Technology),2013,44(8):3210-3216(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZNGD201308019.htm [13] 武云丽,李佳嘉,曾海波,等.带有大型挠性网状天线航天器的鲁棒H∞控制方法[J].控制理论与应用,2013,30(3):365-372.WU Y L,LI J J,ZENG H B,et al.Robust H-infinity control design for spacecrafts with large flexible netted antennas[J].Control Theory & Applications,2013,30(3):365-372(in Chinese). [14] 赵欣,马彩文.基于混合H2/H∞控制的自适应光学系统设计与仿真[J].光子学报,2014,43(12):1-7.ZHAO X,MA C W.Design and simulation of the adaptive optics system based on mixed H2/H∞ control[J].Acta Photonic Sinica,2014,43(12):1-7(in Chinese). [15] 宋康宁,丛爽,邓科,等.自适应强跟踪卡尔曼滤波在陀螺稳定平台中的应用[J].中国科学技术大学学报,2015,45(1):17-23. http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD201501003.htmSONG K N,CONG S,DENG K,et al.Application of adaptive strong tracking Kalman filter to gyro-stabilized platform[J].Journal of University of Science and Technology of China,2015,45(1):17-23(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZKJD201501003.htm [16] 石勇,韩崇昭.自适应UKF算法在目标跟踪中的应用[J].自动化学报,2011,37(6):755-760. http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201106013.htmSHI Y,HAN C Z.Adaptive UKF method with applications to target tracking[J].Acta Automatica Sinica,2011,37(6):755-760(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-MOTO201106013.htm [17] 杨东,毛耀,丁科,等.模型参考算法在快速反射镜中的应用[J].红外与激光工程,2013,42(10):2790-2796. http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201310036.htmYANG D,MAO Y,DING K,et al.Application of model reference adaptive algorithm in fast-steering mirrors[J].Infrared and Laser Engineering,2013,42(10):2790-2796(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HWYJ201310036.htm [18] GINOYA D,SHENDGE P D,PHADKE S B.Disturbance observer based sliding mode control of nonlinear mismatched uncertain systems[J].Communications in Nonlinear Science and Numerical Simulation,2015,26(1-3):98-107. doi: 10.1016/j.cnsns.2015.02.008 [19] KIM K S,REW K H.Reduced order disturbance observer for discrete-time linear systems[J].Automatica,2013,49(4):968-975. doi: 10.1016/j.automatica.2013.01.014 [20] 魏伟,戴明,李嘉全,等.基于频域的光电稳定平台扰动观测器设计[J].山东大学学报(工学版),2015,45(4):45-50. http://www.cnki.com.cn/Article/CJFDTOTAL-SDGY201504007.htmWEI W,DAI M,LI J Q,et al.Design of the disturbance observer of opto-electronic platform in frequency domain[J].Journal of Shangdong University(Engineering Science),2015,45(4):45-50(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-SDGY201504007.htm [21] 任彦,刘正华,周锐.滑模干扰观测器在低速光电跟踪系统中的应用[J].北京航空航天大学学报,2013,39(6):835-841. http://bhxb.buaa.edu.cn/CN/abstract/abstract12656.shtmlREN Y,LIU Z H,ZHOU R.Application of low speed opto-electronic tracking systems based on sliding mode disturbance observer[J].Journal of Beijing University of Aeronatutics and Astronautics,2013,39(6):835-841(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12656.shtml [22] 胡贞,姜会林,佟首峰.滑模控制对激光通信ATP系统跟踪性能的改善[J].北京理工大学学报,2012,32(5):522-526. http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201205020.htmHU Z,JIANG H L,TONG S F.Improvement of STP system tracking performance of laser communication using sliding mode control[J].Transaction of Beijing Institute of Technology,2012,32(5):522-526(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-BJLG201205020.htm [23] 肖海峰,刘海龙,贺昱曜,等.线性滑模变结构的IPMSM直接转矩控制研究[J].控制工程,2015,22(1):144-150. http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201501027.htmXIAO H F,LIU H L,HE Y Y,et al.Linear sliding-mode variable structure research of direct torque control for IPMSM[J].Control Engineering of China,2015,22(1):144-150(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JZDF201501027.htm [24] 邹权,钱林方,蒋清山.永磁同步电机伺服系统的自适应模糊滑模控制[J].控制理论与应用,2015,32(6):817-823. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201506013.htmZOU Q,QIAN L F,JIANG Q S.Adaptive fuzzy sliding-mode control for permanent magnet synchronous motor servo system[J].Control Theory & Applications,2015,32(6):817-823(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201506013.htm [25] 高为炳.变结构控制理论基础[M].北京:中国科学技术出版社,1990.GAO W B.Theory of variable structure control[M].Beijing:Science and Technology of China Press,1990(in Chinese). [26] UTKIN V I.Sliding mode in control and optimizaiton[M].New York:Springer,1992. [27] BARTOLINI G,FERRARA A,LEVANT A,et al.On second order sliding mode controllers[M]//YOUNG K D,OZGUNER U.Variable structure systems,sliding mode and nonlinear control.Berlin:Springer,1999:329-350. [28] DAVILA J,FRIDMAN L,LEVANT A.Second-order sliding-mode observer for mechanical systems[J].IEEE Transactions on Automatic Control,2005,50(11):1785-1789. doi: 10.1109/TAC.2005.858636 [29] FRIDMAN L,LEVANT A,DAVILA J.High-order sliding-mode observer for linear systems with unknown inputs[C]//Proceedings of 2006 Mediterranean Conference on Control and Automation.Piscataway,NJ:IEEE Press,2006:736-741. [30] MORENO J A.On strict Lyapunov functions for some non-homogeneous super-twisting algorithms[J].Journal of the Franklin Institute,2014,351(4):1902-1919. doi: 10.1016/j.jfranklin.2013.09.019 [31] BARTOLINI G,FERRARA A,USAI E.Output tracking control of uncertain nonlinear second-order systems[J].Automatica,1997,33(12):2203-2212. doi: 10.1016/S0005-1098(97)00147-7 [32] LEVANT A.Sliding order and sliding accuracy in sliding mode control[J].International Journal of Control,1993,58(6):1247-1263. doi: 10.1080/00207179308923053 [33] 高为炳.非线性系统的变结构控制[J].自动化学报,1989,15(5):408-416.GAO W B.Variable structure control to nonlinear systems[J].Acta Automatica Sinica,1989,15(5):408-416(in Chinese). [34] CHAKRABARTY S,BANDYOPADHYAY B.A generalized reaching law for discrete time sliding mode control[J].Automatica,2015,52:83-86. doi: 10.1016/j.automatica.2014.10.124 [35] UTKIN V I,POZNYAK A S.Adaptive sliding mode control with application to super-twist algorithm:Equivalent control method[J].Automatica,2013,49(1):39-47. doi: 10.1016/j.automatica.2012.09.008 [36] ZHONG F L,LI H,ZHONG S M,et al.An SOC estimation approach based on adaptive sliding mode observer and fractional order equivalent circuit model for lithium-ion batteries[J].Communications in Nonlinear Science and Numerical Simulation,2015,24(1-3):127-144. doi: 10.1016/j.cnsns.2014.12.015 [37] ALWI H,EDWARDS C.An adaptive sliding mode differentiator for actuator oscillatory failure case reconstruction[J].Automatica,2013,49(2):642-651. doi: 10.1016/j.automatica.2012.11.042 [38] ZHANG M J,LIU X,YIN B J,et al.Adaptive terminal sliding mode based thruster fault tolerant control for underwater vehicle in time varying ocean currents[J].Journal of the Franklin Institute,2015,352(11):4935-4961. doi: 10.1016/j.jfranklin.2015.08.009 [39] TALEB M,LEVANT A,PLESTAN F.Pneumatic actuator control:Solution based on adaptive twisting and experimentation[J].Control Engineering Practice,2013,21(5):727-736. doi: 10.1016/j.conengprac.2012.06.011 [40] 丛炳龙,刘向东,陈振.一种改进的自适应滑模控制及其在航天器姿态控制中的应用[J].控制与决策,2012,27(10):1471-1477. http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201210007.htmCONG B L,LIU X D,CHEN Z.An improved adaptive sliding mode control for spacecraft attitude control[J].Control and Decision,2012,27(10):1471-1477(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZYC201210007.htm [41] PLESTAN F,SHTESSEL Y,BREGEAULT V,et al.Sliding mode control with gain adaptation-Application to an electropneumatic actuator[J].Control Engineering Practice,2013,21(5):679-688. doi: 10.1016/j.conengprac.2012.04.012 [42] 谢文博,付明玉,施小成.动力定位船舶自适应滑模无源观测器设计[J].控制理论与应用,2013,30(1):131-137. http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201301019.htmXIE W B,FU M Y,SHI X C.Adaptive sliding-mode passive observer design for dynamic positioning vessel[J].Control Theory & Applications,2013,30(1):131-137(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201301019.htm [43] 杨帆,马大为,胡健.防空火箭炮无抖振滑模鲁棒控制策略设计[J].火炮发射与控制学报,2012(1):51-56. http://www.cnki.com.cn/Article/CJFDTOTAL-HPFS201201013.htmYANG F,MA D W,HU J.Design of chattering free robustness sliding mode control stratege of antiaircraft rocket launcher[J].Journal of Gun Launch & Control,2012(1):51-56(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HPFS201201013.htm [44] 付培华,陈振,丛炳龙,等.基于反步自适应滑模控制的永磁同步电机位置伺服系统[J].电工技术学报,2013,28(9):288-295. http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201309036.htmFU P H,CHEN Z,CONG B L,et al.A position servo system of permanent magnet synchronous motor based on back-stepping adaptive sliding mode control[J].Transactions of China Electrotechincal Society,2013,28(9):288-295(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-DGJS201309036.htm [45] ASHOKN R,SHTESSEL Y.Control of fuelcell-based electric power system using adaptive sliding mode control and observation techniques[J].Journal of the Franklin Institute,2015,352(11):4911-4934. doi: 10.1016/j.jfranklin.2015.04.010 [46] 陈强,南余荣,邢科新.基于扩张状态观测器的永磁同步电机混沌系统自适应滑模控制[J].物理学报,2014,63(22):113-120. http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201422016.htmCHEN Q,NAN Y R,XING K X.Adaptive sliding-mode control of chaotic permanentmagnet synchronous motor system based on extended state abserver[J].Acta Physica Sinica,2014,63(22):113-120(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-WLXB201422016.htm -

 下载:
下载:


 点击查看大图
点击查看大图

计量
- 文章访问数: 1103
- HTML全文浏览量: 158
- PDF下载量: 786
- 被引次数: 0
