



Influence of loss of three-dimensional information on manipulator teleoperation mission
-
摘要:
视觉作为人认知环境的主要信息通道,在空间遥操作任务中有极其重要的作用。本研究面向空间站机械臂遥操作任务,通过对24名被试进行机械臂遥操作模拟平台实验,探索不同程度空间立体信息缺失对机械臂遥操作绩效、脑力负荷、距离感知和情境意识的影响,剖析不同立体信息在遥操作过程中的作用。实验结果表明:局部立体信息对提高遥操作任务完成率、减少撞击操作等指标有重要作用;而全局立体信息更有利于减少机械臂冗余行走距离和限位操作次数;两者对脑力负荷水平的降低有显著影响,而对距离估计偏差和情境意识水平影响不显著。因此,根据不同任务类型选取合适的立体信息补偿,从多个角度完善立体信息的呈现对于保障遥操作任务的顺利进行具有重要意义。
Abstract:As the main information channel via that human cognitive environment, visual information plays an extremely important role in the space teleoperation mission. Aimed at the future station robotics teleoperation mission, twenty four subjects were recruited to finish the simulation task, so as to investigate the effect of different extent of three-dimensional information loss on human performance, mental workload, distance perception and situation awareness, and to study the role of spatial information in teleoperation. The results show that the local stereo information plays an important role in improving the completion rate and reducing collision of the teleoperation mission; the global spatial information are more advantageous to reduce redundant flying distance and the times of limit operation; both the two kinds of information have a significant influence on reducing mental load level, but have few effect on distance estimation error and situation awareness level. Therefore, it is important to select the suitable stereo information compensation type according to the tasks and to optimize the stereo information display with various methods for completing teleoperation task smoothly.
-
当前以空间站机械臂、星球探测器为代表的空间遥操作机器人在国际空间研究中有着越来越广泛的应用,在空间站建设和空间探索等任务中也发挥着至关重要的作用[1-3]。
空间站远程机械臂操作系统主要由航天员在空间站进行控制[4-5]。由于空间位置的限制主操作员主要利用3个视频反馈系统进行调控,包括机械臂上摄像头返回的视频信息和各个场景摄像头返回的视频信息。根据NASA报告结果发现,航天员进行机械臂遥操作时,主要依赖机械臂末端摄像头和场景摄像头获取的视频信息以及机械手上的传感器传回的数据信息进行操作控制[6]。面对复杂多变的太空环境,深度立体信息的补偿很难做到完善。这种传统视频反馈信息获取方式一方面缺少直接的深度维度的视觉信息[7],操作者需要对多个场景信息进行三维重构,极大地加重操作者的认知负荷,增加了操作的难度[8-10];另一方面,当面临多种突发状态如摄像头失效、光照不足等不利于机械臂遥操作的情形,操作员为完成任务仅能依靠有限的空间立体信息进行对接操作。
航天员在轨执行任务时,由于环境的特殊性,即使一个简单失误的危害性也很大[11]。在载人航天飞行过程中,由于信息缺失引发的事故屡见不鲜[12-13]。有调查研究表明,传统的依靠摄像头视频信息进行在轨遥操作极易导致碰撞、机械手空抓等失误事故,甚至对对接成功率也产生了一定的影响[4, 10, 12]。因此,研究空间立体信息缺失情形下,机械臂遥对接任务各项绩效指标受到的影响,操作员脑力负荷水平的变化以及不同情形下操作员对场景的情境意识水平,对比分析不同空间立体信息缺失对机械臂遥操作的影响作用,为深入剖析空间立体信息对机械臂遥操作的影响作用提供数据和理论支撑,同时也为完善遥操作界面信息显示提供了理论参考,对完善载人航天任务的人因可靠性分析体系有重要意义。
本研究基于机械臂遥操作模拟仿真平台,结合常用的机械臂对接实验任务,通过调整仿真平台上摄像头的布局构建4种不同水平的空间立体信息缺失场景,研究在这些场景下遥操作过程中绩效指标、脑力负荷水平、距离感知水平以及情境意识水平的变化趋势。
1. 方法
1.1 实验平台
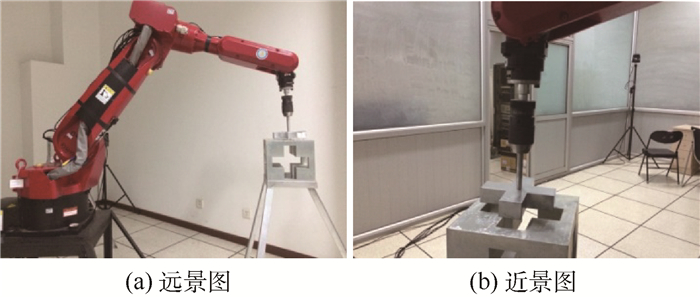
在V-REP PRO (EDU版本) 仿真机器人软件平台上,构建机械臂仿真场景,模拟真实机械臂对接任务。软件平台通过lua脚本语言进行编程,结合摄像头数量和位置的设置,实现任务和场景的设置,以及实验中相关数据的采集和后台记录。机械臂仿真实验场景是基于实体机械臂对接任务建立的模拟任务平台,图 1为实体机械臂对接场景。
实验中末端运动速度保持匀速,每次实验难度(表现为初始距离和角度偏差) 设置大体均等。实验软件平台在后台以2.5 Hz的频率记录操作中的绩效数据。记录的原始数据包括当前时刻末端6个自由度上的相对偏差、机械臂6个关节的当前角度、左右手手柄6个控制方向的实时操作电平值、末端累计运动的距离值、出现的碰撞次数、到达关节限位位置次数、机械臂临近工作区域次数、操作时间等。
1.2 受试者
本科以上学历、年龄在20~35岁之间的男性24人,右利手,双眼矫正视力4.8以上,无色盲,身体健康且没有任何精神病历史。
为保证被试的同质性,被试在培训之前需保证没有接触过相关机械臂模拟操作训练。
对被试进行统一的机械臂模拟操作培训,且正式实验前需自主操作训练达10次以上。
1.3 实验任务
实验的主要任务是在计算机仿真平台上进行机械臂模拟对接操作。
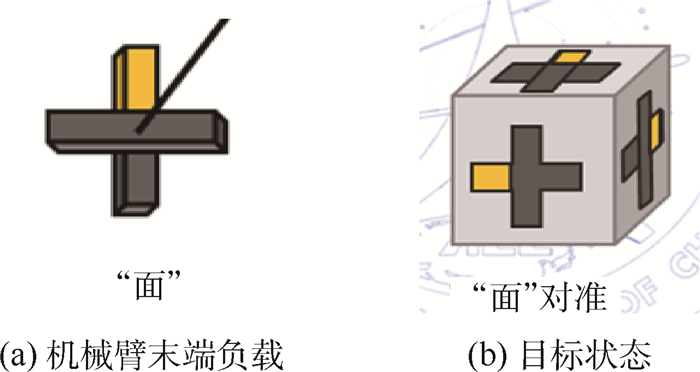
本研究采用了“面”对准的操作任务,通过手柄控制仿真实验场景中机械臂末端上带有颜色标记的十字形载荷(如图 2(a)所示),在机械臂工作可达域内完成对接任务。对接目标是2个立方体中的任意一个中的任意一面(每个目标块上各开设了3个十字槽,如图 2(b)所示)。每次操作任务,系统会随机选取并用颜色标记本次任务的对接目标;操作者需要在规定时间内(240 s),充分借助摄像头的视频反馈信息,左手操作机械臂平移手柄(莱仕达雷霆PXN-2103),右手操作机械臂姿态手柄,控制6关节6自由度机械臂的末端位移和姿态的变化,使末端十字机构以颜色标记相对应的姿态插入选定的对接槽(对接成功条件是平移3个维度相对偏差都小于0.008 m,姿态3个维度偏差都小于2°)。
在受试者操作手柄控制机械臂执行本实验设定的对接任务时,实际上经过3个操作阶段:第1阶段即操作机械臂使对接目标面出现在机械臂末端摄像头的视野中;第2阶段主要依靠摄像机图像调整末端十字负载的位置和姿态,使与目标对接槽基本对准;第3阶段即精准、无故障地完成精细对接任务。
1.4 实验设计
1.4.1 实验因素及水平
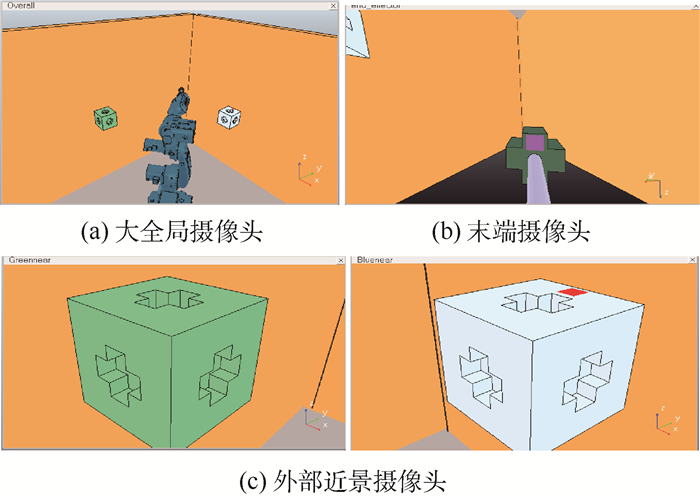
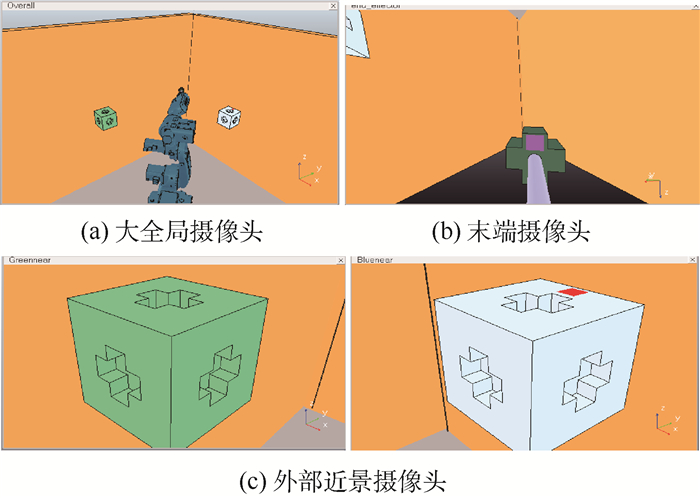
本研究通过对被试的筛选、被试实验顺序的平衡控制[14]以及充分的训练排除被试新老手问题的影响、被试性格情绪的影响、实验难度的影响、疲劳效应的影响、学习效应的影响以及其他环境因素的影响;针对空间立体信息缺失一个因素,其中包含4个水平(以下以A、B、C、D代替),需要有3种位置的摄像头:大全局摄像头(见图 3(a))、末端摄像头(见图 3(b))、外部近景摄像头(见图 3(c))。每个水平下被试重复操作实验5次。
1) 水平A:立体信息完全缺失,1个末端摄像头。
2) 水平B:局部立体信息缺失(全局信息补偿),1个末端摄像头+1个大全局摄像头。
3) 水平C:全局立体信息缺失(局部信息补偿),1个末端摄像头+1个外部近景摄像头。
4) 水平D:立体信息基本完整(全局+局部信息补偿),1个末端摄像头+1个大全局摄像头+1个外部近景摄像头。
实验为组内设计,为避免学习效应以及其他因素的影响,将24名被试随机分为4组,并采用拉丁方平衡设计安排4组被试4种水平的实验顺序[14]。
实验的因变量包括有立体信息4种缺失水平条件下的模拟平台程序直接获取的绩效指标、距离估计偏差数据、情境意识数据(问卷调查获取) 和脑力负荷数据(NASA-TLX问卷调查获取)。
1.4.2 实验流程
实验主要分成2个部分:第1部分先对被试进行机械臂操作技能培训;第2部分为正式的模拟平台操作实验。
技能培训部分主要分成3个部分。第1部分主要对被试进行机械臂相关知识的介绍,包括机械臂的各类参数、实验任务完成条件以及机械臂操作过程中容易出现的事故和常见的错误操作介绍,同时还包括各个摄像头界面的摄像头位置、坐标系间的关系、各个界面信息的主要用途的介绍。第2部分主要对机械臂的操作方法进行介绍;被试左手控制手柄实现对机械臂末端上下、前后、左右3个自由度的控制,右手控制手柄实现对机械臂前后俯仰、左右偏航、顺时针逆时针滚转3个自由度姿态的控制;对被试进行同一种对接策略的讲解培训,并给予示范。第3部分为被试的实践操作,每人操作10次以上。图 4为被试在进行模拟操作训练。
正式实验在培训后1~3 d内进行,被试在4种不同空间立体信息水平下进行实验操作,每种水平操作5次。每个水平结束后被试填写情境意识调查问卷和脑力负荷调查问卷。
1.5 数据采集
1.5.1 绩效数据采集
针对航天员在轨进行机械臂作业,NASA为保障操作的顺利进行为航天员制定了详细的训练计划,同时也制定了详细的操作技能评估指标。根据NASA通用机器人训练技能评估标准[4],结合航天员中心薛书骐等梳理并经过实验筛选出的11项绩效指标,结合任务的特性对10项绩效指标(见表 1) 进行统计分析。
表 1 绩效指标Table 1. Performance indicators绩效指标 描述 对接成功与否 是否在规定时间完成对接 多轴操作效率 多轴操作的持续时间占的百分率 任务完成时间 完成时间或失败时间 末端“行走”的多余距离 机械臂的最终行走距离减去初始距离偏差 位置偏差 机械臂负载与目标的最终距离偏差 角度偏差 机械臂负载与目标的最终角度偏差 错误操作次数 向一个方向操纵了手柄,随即发现该方向错误,于是改向相反方向操作 对接碰撞次数 与目标物碰撞的次数 关节限位次数 任一关节到达限位角度极限的次数 临近工作空间次数(close次数) 机械臂末端或关节过于靠近工作区域边缘的次数 1.5.2 距离感知水平评估数据
为了得到被试在不同立体信息水平下对距离的估计偏差,在操作过程中,要求被试在机械臂末端距离目标对接面0.1 m和0.01 m的位置报告主试,主试做出标记(时间)。根据记录的时间点统计被试在每次报告时末端距离目标对接面的实际距离,计算距离估计的绝对偏差即作为被试距离感知水平的评估指标。
1.5.3 NASA-TLX问卷数据
NASA-TLX[15-16]问卷从心理需求、体力需求、时间需求、作业业绩、努力程度和挫折水平6个维度对被试的脑力负荷进行评估,包括2个过程:
1) 被试根据自己在操作过程中的主观感受,分别在6个维度的评分尺度线上进行打分。
2) 采用两两比较的方法,将6个维度两两配对组成15个子对,要求被试选出每个对子中对自身脑力负荷水平要求更高的维度,根据每一维度被选中的次数(0~5) 确定该维度在脑力负荷评价中的权重。分别统计每个维度的评分值,最终取6个维度的加权平均值即为总的脑力负荷水平。
1.5.4 情境意识指标数据
通过情境意识评定技术(Situational Awareness Rating Technique,SART) 标准情境意识调查问卷表(共10个条目) 对被试进行情境意识水平调查,包括被试在实验中感觉到的情境的稳定性、情境的变化性、情境的复杂度、信息的数量、信息的质量和对情境的熟悉程度,以及被试操作过程中的唤醒水平、剩余心理资源、注意集中程度、注意分配水平。被试分别对每个条目进行1~7分从低到高级别的打分[17]。
2. 结果
2.1 绩效指标的相关性分析
为明确遥操作各项指标之间的关系,深入挖掘对遥操作对接成功率以及对接时间产生主要影响的对接过程指标,通过提高相应的对接过程指标水平从而逐渐提高对接成功率,减少对接时间消耗,为航天员遥操作训练提供了理论参考。
绩效指标之间的相关关系如表 2所示。成功率与碰撞次数、限位次数、平均操作时间、错误操作、多余行走距离、多轴操作、位置偏差和角度偏差都有显著的相关关系;碰撞次数与多余行走距离、多轴操作效率、close次数、角度偏差显著相关;平均操作时间与错误操作、多余行走距离、限位次数、多轴操作效率、位置偏差和角度偏差显著相关;限位次数、错误操作次数与位置偏差、角度偏差有显著相关关系;多余行走距离和错误操作、close次数、位置偏差和角度偏差显著相关;close次数和多轴操作显著相关。
表 2 绩效相关性分析结果Table 2. Correlation analysis results of performance indicators相关系数 碰撞次数 限位次数 平均操作时间 错误操作次数 多余行走距离 多轴操作效率 close次数 位置偏差 角度偏差 成功率 -0.195(0.057) -0.394** -0.702** -0.536** -0.425** 0.179(0.081) -0.075 -0.568** -0.730** 碰撞次数 - -0.046 0.164 0.144 0.250* 0.217* 0.290** 0.053 0.263** 限位次数 - 0.338** 0.117 0.168 0.007 0.030 0.314** 0.390** 平均操作时间 - 0.499** 0.468** -0.380** 0.094 0.386** 0.512** 错误操作次数 - 0.563** -0.022 0.094 0.338** 0.455** 多余行走距离 - 0.170 0.266** 0.207* 0.293** 多轴操作效率 - 0.265** -0.158 -0.145 close次数 - 0.026 0.010 位置偏差 - 0.655** 注:*代表0.01 < P < 0.05,**代表P < 0.01,P为显著性概率值,括弧内为边缘显著性P值,下同。 2.2 空间立体信息4种缺失水平对绩效的影响
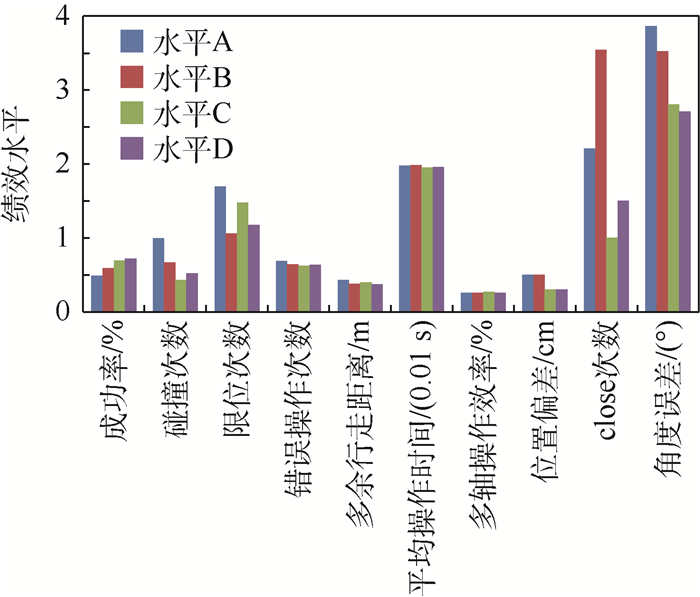
对4种空间立体信息水平下被试的绩效成绩进行方差统计分析发现,空间立体信息对提高对接成功率(统计量F=5.292,P=0.002)、减少碰撞次数(F=3.576,P=0.035)、位置偏差(F=2.674,P=0.054) 以及角度偏差(F=5.642,P=0.002) 的影响作用较为显著,对其余指标没有显著性影响。A、B、C、D 4种水平绩效统计结果如图 5所示。
A、B、C、D 4种水平绩效成对比较分析结果如表 3所示。
表 3 4种水平绩效成对比较结果Table 3. Paired comparison results of performance at four levels均值差 A-B A-C A-D B-C B-D C-D 成功率/% -0.100(0.076) -0.200* -0.225* -0.100 -0.125(0.053) -0.025 碰撞次数 0.325(0.057) 0.558** 0.467* 0.233 0.142 -0.092 限位次数 0.642 0.225 0.525 -0.417 -0.117 0.300 平均操作时间/s -0.810 2.425 2.082 3.235 2.892 -0.343 错误操作次数 4.358 6.375 5.117 2.017 0.758 -1.258 多余行走距离/m 0.055 0.034 0.059 -0.022 0.003 0.025 多轴操作效率/% -0.004 -0.024 0.000 -0.010 0.004 0.014 close次数 -1.333 1.208 0.708 2.542* 2.042(0.058) -0.500 位置偏差/m 0.001 0.002(0.061) 0.002* 0.001 0.002 0.000 角度偏差/(°) 0.344 1.059** 1.156** 0.715(0.092) 0.811* 0.096 局部信息缺失对比分析结果发现(A-C、B-D):成功率显著降低,碰撞次数显著提高,角度偏差显著增大,close次数明显增多;而平均操作时间、错误操作次数有所增加但不显著。
全局信息缺失对比分析结果发现(A-B、C-D):成功率有所降低,限位次数、多余行走距离和角度偏差都有所增加。除此之外,close次数反而有所增加。
局部信息缺失相比全局信息缺失而言(B-C),close次数和角度偏差明显增多,但是限位次数有所减少。而立体信息完全缺失和空间立体信息完整水平相比(A-D),对接成功率显著降低,碰撞次数、位置偏差、角度偏差显著提高,限位次数也有所增多。
2.3 空间立体信息4种缺失水平对脑力负荷的影响
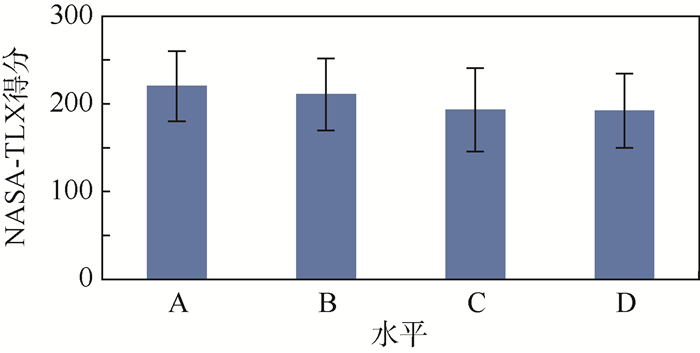
4种空间立体信息缺失水平下NASA-TLX问卷调查方差统计结果如图 6所示,4种水平具有显著性差异(F=5.425,P=0.005)。
 图 6 4种水平脑力负荷均值-标准差图Figure 6. Mean-standard deviation chart of mental workload at four levels
图 6 4种水平脑力负荷均值-标准差图Figure 6. Mean-standard deviation chart of mental workload at four levels4种水平的NASA-TLX问卷水平成对比较结果如表 4所示。
表 4 4种水平脑力负荷成对比较结果Table 4. Paired comparison results of mental workload at four levels信息水平 A-B A-C A-D B-C B-D C-D 均值 9.504 26.879* 28.337* 17.375* 18.833* 1.458 很显然,不同的空间立体信息水平下,脑力负荷差异变化明显;立体信息的补偿水平由完全缺失(A水平)-全局补偿(B水平)-局部补偿(C水平)-全局+局部补偿(D水平),脑力负荷水平逐级下降。C水平和D水平相对于A、B水平都有显著性下降。
2.4 空间立体信息4种缺失水平对距离感知的影响
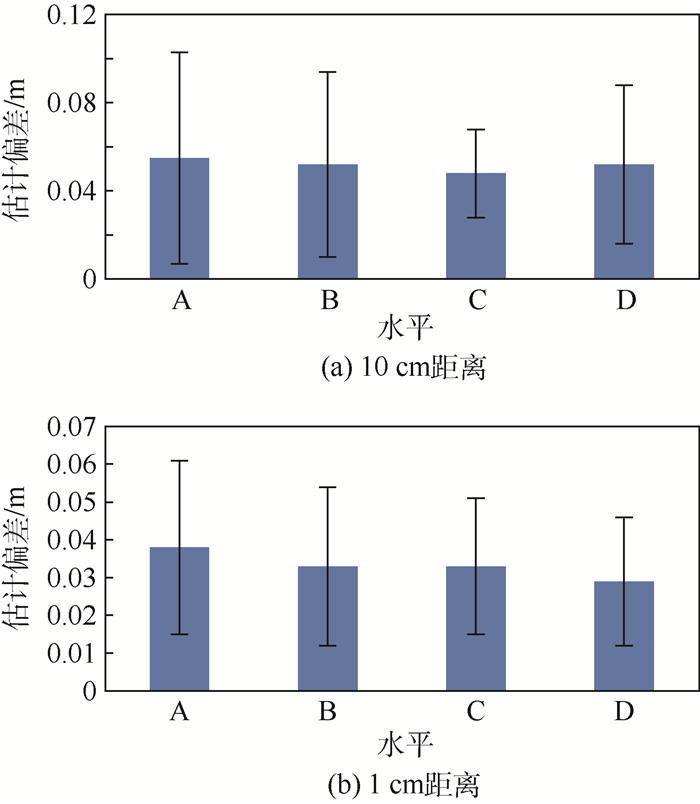
对4种空间立体信息缺失水平下距离估计偏差进行方差统计分析,结果没有显著性差异,结果如图 7所示。
 图 7 4种水平距离估计偏差均值Figure 7. Mean-standard deviation chart of distance estimation error at four levels
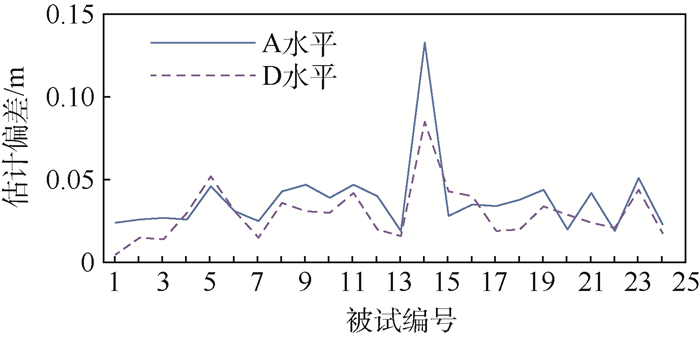
图 7 4种水平距离估计偏差均值Figure 7. Mean-standard deviation chart of distance estimation error at four levels对于1 cm距离估计,4种水平虽然没有表现出显著性的差异,但是从均值直方图和分布图(见图 8) 可以看出全局信息和局部信息的补偿对于距离的估计都有比较明显的促进作用。而对10 cm的估计,4种水平没有表现出明显的变化趋势。
 图 8 水平A、D 1 cm距离估计偏差曲线Figure 8. 1 cm-distance estimation error curves of A and D levels
图 8 水平A、D 1 cm距离估计偏差曲线Figure 8. 1 cm-distance estimation error curves of A and D levels2.5 空间立体信息4种缺失水平对情境意识的影响
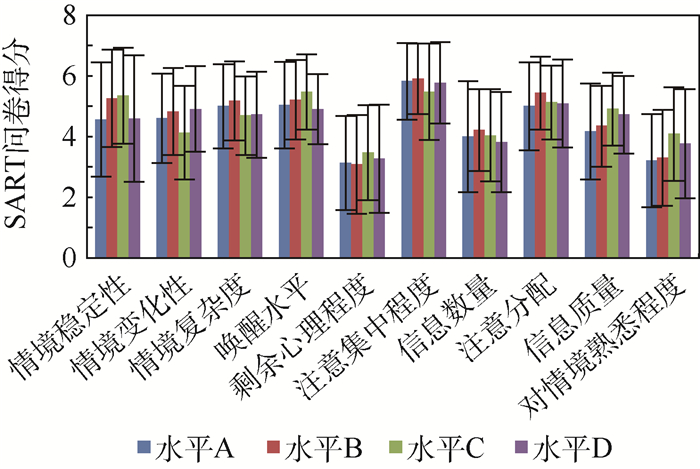
对空间立体信息4种缺失水平下情境意识水平各个条目进行方差统计分析(见图 9),结果没有显著变化。
 图 9 4种水平情境意识均值-标准差图Figure 9. Mean-standard deviation chart of situation awareness at four levels
图 9 4种水平情境意识均值-标准差图Figure 9. Mean-standard deviation chart of situation awareness at four levels3. 讨论
3.1 绩效指标之间的关联
从各项绩效指标的相关性分析结果中可以看出,作为反应最终绩效水平的对接成功率、对接时间与对接过程指标有着显著的联系,而过程指标之间也存在许多内在的关联。
错误操作和限位次数以及多余行走距离是影响机械臂遥对接成功概率的关键,而位置、角度偏差也直接关系到对接是否成功,与对接成功率有着显著的联系;错误操作、限位次数、多余行走距离和多轴操作对对接的时间有直接的影响,错误操作次数和限位次数越多、行走的冗余距离越长、多轴操作效率越小,对接完成时间则越长;在发生碰撞事故的同时临近工作区域(close) 的事故也同样多发,而多轴操作与这2项事故也有显著的相关关系,说明多轴操作越频繁,越容易导致碰撞事故和close事故发生,同时2种事故的发生也使得冗余操作增加,从而提高对接过程中机械臂的“行走”距离;对于位置偏差和角度偏差,基本和各项绩效指标都有很强的相关关系(除了多轴操作和close次数指标),说明位置和角度偏差越大,越容易引发碰撞、限位等事故,同时也不可避免地增加了操作的时间和冗余行走距离;此外,偏差大小与错误操作也存在显著性的关联。
3.2 空间立体信息缺失对绩效指标的影响
相比全局信息,局部信息对提高对接遥操作的成功率、减少对接过程中close次数、减少对接后期精确对接阶段的碰撞次数和角度偏差有更加显著的功效;而全局信息的补偿,对减少对接过程中由于空间信息不足带来的关节限位次数和多余行走距离有更加明显的效果。一方面,局部立体信息弥补了末端摄像头中缺失的深度信息,为精细对接阶段提供了有效的视觉线索,减少了后期精细对接过程中容易出现的碰撞事故,有效降低了对接的角度偏差,从而提高对接成功率;其次,局部摄像头的增加,为被试提供了机械臂末端与对接目标之间相对位置信息,通过末端与目标的相对位置信息可以判断末端与工作区域(墙壁、天花板) 之间的相对位置关系,进而能够有效减少对接过程中的close次数。而全局信息在机械臂遥对接过程中的主要作用是为被试提供机械臂的姿态信息以及机械臂与大全局之间的相对位置关系,对路径的规划[18]、冗余行走距离的减少有积极的作用,且被试通过获取的机械臂姿态信息能够比较直观地观察到机械臂各个关节的角度变化,对减少关节限位操作起到积极的效果;而大全局的相对位置信息,信息比较全相对则不够精确,对被试判断机械臂与环境之间的位置关系有时带来负面的效果,从而造成close次数不降反升的情况。
由于关节限位操作以及机械臂多余行走距离与对接任务的操作时间呈显著正相关关系,因此,全局信息补偿能够有效减少限位操作和冗余距离的同时,也缩短了这些冗余操作带来的时间,对于减少在轨能量消耗起到非常重要的作用。而局部立体信息的主要功能更倾向于减少遥操作过程中事故的发生,提高遥对接任务的对接成功率。
3.3 空间立体信息缺失对脑力负荷水平、情境意识水平以及距离感知水平的影响
空间立体信息缺失水平下,可视化信息相对于具有完整空间立体信息水平下大量减少,空间信息大量缺失,摄像头界面缩减,被试能够利用的视觉信息大量减少,其造成对接过程的脑力负荷水平显著提高,进一步说明了机械臂遥操作过程中空间立体信息的重要性。而A-C、A-D、B-D、B-C之间的显著性差异以及4种水平的脑力负荷下降趋势可以看出,相比全局立体信息,局部立体信息的补偿对脑力负荷的降低更有效果。在实验中发现,在进行遥对接操作时,大部分被试在对接的第1阶段和第2阶段所用的时间只占最终时间的一半不到,而大部分时间花费在最后的精细对接阶段。一方面,被试需要时刻观察末端与目标之间的相对位置,避免发生碰撞事故;另一方面,被试需要根据有限的视觉信息判断末端与目标之间的角度关系,判断是否达到平行以满足对接成功的精度要求,而这一部分要求被试反复的对比末端与目标的相对位置信息、反复调节末端的姿态。因此,最后阶段的视觉信息至关重要。而局部信息作为一种空间立体信息补偿,为精细对接阶段提供了有效的深度信息,为被试的对接操作提供信息的同时也增强了被试的信心,降低被试受挫感,从而更加有效地降低对接过程的脑力负荷水平。唐志勇和张力在核电站信息显示界面的研究中也指出信息的不足对操作员的心理负荷有较大的影响[19]。
空间立体信息4种缺失水平下,情境意识水平没有比较显著的变化。在水平A空间信息缺失严重的场景下,场景信息简单,被试对场景中的信息的理解比较充分,对情境变化水平把握较好;而对于如D这样的空间信息比较完整,有3个可用摄像头信息,且每个摄像头的视角、坐标系不同,被试面对同时呈现的3个场景信息,要对每个场景信息进行深入的理解以及将各个场景信息进行融会贯通,仅仅通过短时间的训练和操作是无法达到的,因此,在这种水平下,被试对于情境变化的认知、注意资源的分配等方面的负荷相对水平A而言可能更高,情境意识水平得分反而可能降低,因此表现出在空间立体信息比较完整的情形下,情境意识水平相对没有显著的提高。在核电站的相关研究中也有类似发现,核电站数字化显示相比传统界面信息更加完整,但是也极容易导致操作员注意分配负荷增加、情境意识丧失等影响[20]。
局部立体信息补偿和全局立体信息补偿对于短距离(1 cm) 的估计都有一定的促进作用,与实验预期基本符合。而局部信息补偿后距离估计偏差方差更小,说明局部信息补偿效果更加的稳定。对于长距离而言,实验中局部立体信息和全局立体信息的补偿并不能很好的减小距离估计偏差,说明通过简单的补偿视觉方面的立体信息,并不能有效的提高长距离估计精度。结合实际的操作经验,长距离估计更多地依靠参照物信息(地表理论) 或者实时的数据反馈[12, 21]。而对于在轨遥操作任务,太空环境下舱内环境的参照物之间的距离较短,而舱外环境下的参照物之间的距离过大,参照物距离梯度出现中断,缺少中间长度距离的参照过渡,因此仅仅依靠参照物进行长距离的估计显然不能达到目的[21]。目前实时距离数据信息反馈对于降低长距离估计偏差有着重要的作用。
4. 结论
局部立体信息和全局立体信息对绩效水平和情境意识水平的提高都有一定的促进作用,都能有效地降低机械臂遥对接过程的脑力负荷水平,对于短距离(1 cm) 的估计都有一定的促进作用。相比局部立体信息,全局立体信息对减少对接过程中由于空间信息不足带来的关节限位次数和多余行走距离有更加明显的效果,同时也有效缩短了耗费在这些冗余操作上的时间,对于减少在轨能量消耗起到非常重要的作用。而相比全局立体信息:
1) 局部立体信息对提高对接遥操作的成功率,减少对接过程中close次数,减少对接后期精细对接阶段的碰撞次数和角度偏差有显著作用。
2) 局部立体信息对脑力负荷的降低效果更加显著。
3) 局部立体信息补偿下,短距离估计偏差方差更小,局部信息对短距离估计的补偿效果更加稳定。此外,实时距离数据信息反馈对于降低长距离估计偏差有着重要的不可替代的作用。
因此,根据不同的机械臂遥操作任务,有针对性地进行空间立体信息补偿,从不同角度完善立体信息补偿的效果,有利于提高操作员信息获取、整合、加工的效率。对于精度要求较高的操作任务,如精细对接任务、抓取任务等,加强局部立体信息的补偿对提高任务的完成质量、降低航天员的操作负荷有重要作用;而对于大范围的搬运、转移任务,如运送航天员作业、监测检查舱外设备等任务,提高全局立体信息的质量对于减少事故的发生、降低任务的完成时间、减少能量消耗有更加显著的意义。
-

图 6 4种水平脑力负荷均值-标准差图
Figure 6. Mean-standard deviation chart of mental workload at four levels

图 7 4种水平距离估计偏差均值
Figure 7. Mean-standard deviation chart of distance estimation error at four levels

图 8 水平A、D 1 cm距离估计偏差曲线
Figure 8. 1 cm-distance estimation error curves of A and D levels
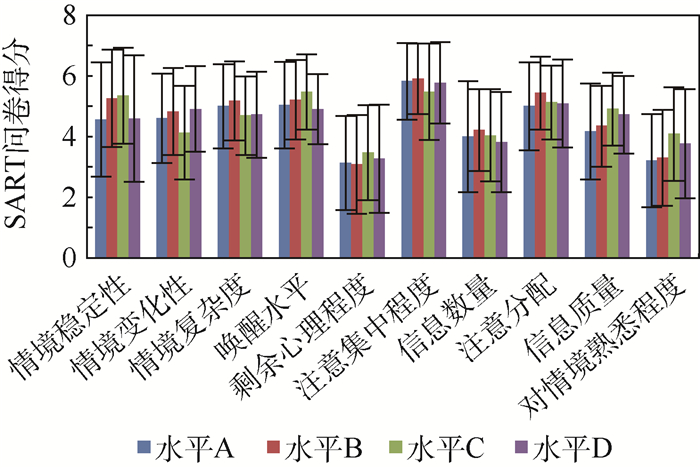
图 9 4种水平情境意识均值-标准差图
Figure 9. Mean-standard deviation chart of situation awareness at four levels
表 1 绩效指标
Table 1. Performance indicators
绩效指标 描述 对接成功与否 是否在规定时间完成对接 多轴操作效率 多轴操作的持续时间占的百分率 任务完成时间 完成时间或失败时间 末端“行走”的多余距离 机械臂的最终行走距离减去初始距离偏差 位置偏差 机械臂负载与目标的最终距离偏差 角度偏差 机械臂负载与目标的最终角度偏差 错误操作次数 向一个方向操纵了手柄,随即发现该方向错误,于是改向相反方向操作 对接碰撞次数 与目标物碰撞的次数 关节限位次数 任一关节到达限位角度极限的次数 临近工作空间次数(close次数) 机械臂末端或关节过于靠近工作区域边缘的次数  下载: 导出CSV
下载: 导出CSV
表 2 绩效相关性分析结果
Table 2. Correlation analysis results of performance indicators
相关系数 碰撞次数 限位次数 平均操作时间 错误操作次数 多余行走距离 多轴操作效率 close次数 位置偏差 角度偏差 成功率 -0.195(0.057) -0.394** -0.702** -0.536** -0.425** 0.179(0.081) -0.075 -0.568** -0.730** 碰撞次数 - -0.046 0.164 0.144 0.250* 0.217* 0.290** 0.053 0.263** 限位次数 - 0.338** 0.117 0.168 0.007 0.030 0.314** 0.390** 平均操作时间 - 0.499** 0.468** -0.380** 0.094 0.386** 0.512** 错误操作次数 - 0.563** -0.022 0.094 0.338** 0.455** 多余行走距离 - 0.170 0.266** 0.207* 0.293** 多轴操作效率 - 0.265** -0.158 -0.145 close次数 - 0.026 0.010 位置偏差 - 0.655** 注:*代表0.01 < P < 0.05,**代表P < 0.01,P为显著性概率值,括弧内为边缘显著性P值,下同。
下载: 导出CSV
表 3 4种水平绩效成对比较结果
Table 3. Paired comparison results of performance at four levels
均值差 A-B A-C A-D B-C B-D C-D 成功率/% -0.100(0.076) -0.200* -0.225* -0.100 -0.125(0.053) -0.025 碰撞次数 0.325(0.057) 0.558** 0.467* 0.233 0.142 -0.092 限位次数 0.642 0.225 0.525 -0.417 -0.117 0.300 平均操作时间/s -0.810 2.425 2.082 3.235 2.892 -0.343 错误操作次数 4.358 6.375 5.117 2.017 0.758 -1.258 多余行走距离/m 0.055 0.034 0.059 -0.022 0.003 0.025 多轴操作效率/% -0.004 -0.024 0.000 -0.010 0.004 0.014 close次数 -1.333 1.208 0.708 2.542* 2.042(0.058) -0.500 位置偏差/m 0.001 0.002(0.061) 0.002* 0.001 0.002 0.000 角度偏差/(°) 0.344 1.059** 1.156** 0.715(0.092) 0.811* 0.096
下载: 导出CSV
表 4 4种水平脑力负荷成对比较结果
Table 4. Paired comparison results of mental workload at four levels
信息水平 A-B A-C A-D B-C B-D C-D 均值 9.504 26.879* 28.337* 17.375* 18.833* 1.458
下载: 导出CSV
-
[1] 薛书骐, 姜国华, 田志强, 等.空间遥操作任务中显控界面关键技术研究进展[J].载人航天, 2014, 20(5):497-502. http://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201405017.htmXUE S Q, JIANG G H, TIAN Z Q, et al.Progress of the key technologies in human-computer interface in space teleoperation[J].Manned Spaceflight, 2014, 20(5):497-502(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201405017.htm [2] MONFERRER A, BONYUET D.Cooperative robot teleoperation through virtual reality interfaces[C]//Proceedings of 6 th International Conference on Information Visualisation, 2002.Piscataway, NJ:IEEE Press, 2002:243-248. [3] YOU S, WANG T, EAGLESON R, et al.A low-cost internet-based telerobotic system for access to remote laboratories[J].Artificial Intelligence in Engineering, 2001, 15(3):265-279. doi: 10.1016/S0954-1810(01)00003-6 [4] FORMAN R E.Objective performance metrics for improved space telerobotics training[D].Cambridge:Massachusetts Institute of Technology, 2011:51-52. [5] 陈善广, 王春慧, 陈晓萍, 等.长期空间飞行中人的作业能力变化特性研究[J].航天医学与医学工程, 2015, 28(1):1-10. http://www.cnki.com.cn/Article/CJFDTOTAL-HYXB201501001.htmCHEN S G, WANG C H, CHEN X P, et al.Study on changes of human performance capabilities in long-duration spaceflight[J].Space Medicine & Medical Engineering, 2015, 28(1):1-10(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-HYXB201501001.htm [6] LAPOINTE J F, DUPUIS E, HARTMAN L, et al.An analysis of low-earth orbit space operations[C]//Proceedings of the Joint Association of Canadian Ergonomists/Applied Ergonomics Conference.Ottawa:NRC, 2002:1-5. [7] WOODS D D, TITTLE J, FEIL M, et al.Envisioning human-robot coordination in future operations[J].IEEE Transactions on Systems, Man, and Cybernetics, Part C:Applications and Reviews, 2004, 34(2):210-218. doi: 10.1109/TSMCC.2004.826272 [8] LAMB P, OWEN D.Human performance in space telerobotic manipulation[C]//Proceedings of the ACM Symposium on Virtual Reality Software and Technology.New York:ACM, 2005:31-37. [9] DEJONG B P, COLGATE J E, PESHKIN M A.Improving teleoperation:Reducing mental rotations and translations[C]//Proceedings of IEEE International Conference on Robotics and Automation, 2004(ICRA'04).Piscataway, NJ:IEEE Press, 2004, 4:3708-3714. [10] MENCHACA-BRANDAN M A, LIU A M, OMAN C M, et al.Influence of perspective-taking and mental rotation abilities in space teleoperation[C]//Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction.New York:ACM, 2007:271-278. [11] 陈善广, 姜国华, 王春慧.航天人因工程研究进展[J].载人航天, 2015, 21(2):95-105. http://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201502004.htmCHEN S G, JIANG G H, WANG C H.Advancement in space human factors engineering[J].Manned Spaceflight, 2015, 21(2):95-105(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZRHT201502004.htm [12] 霍尔R D, 谢勒D J.联盟号飞船[M].周晓飞, 张柏楠, 尚志, 等, 译.北京:中国宇航出版社, 2006:336-338.HALL R D, SHAYLER D J.Soyuz spacecraft[M].ZHOU X F, ZHANG B N, SHANG Z, et al, translated.Beijing:China Astronautic Publishing House, 2006:336-338(in Chinese). [13] 周前祥.载人航天中人的可靠性问题及研究进展[J].中国航天, 2000(12):34-38. http://www.cnki.com.cn/Article/CJFDTOTAL-ZGHT200012015.htmZHOU Q X.Reliability research of human in manned spaceflight[J].Aerospace China, 2000(12):34-38(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-ZGHT200012015.htm [14] 郭秀艳.实验心理学[M].2版.北京:人民卫生出版社, 2013:49-54.GUO X Y.Experimental psychology[M].2nd ed.Beijing:People's Medical Publishing House, 2013:49-54(in Chinese). [15] RUBIO S, DIAZ E, MARTIN J, et al.Evaluation of subjective mental workload:A comparison of SWAT, NASA-TLX, and workload profile methods[J].Applied Psychology, 2004, 53(1):61-86. doi: 10.1111/apps.2004.53.issue-1 [16] 肖元梅.脑力劳动者脑力负荷评价及其应用研究[D].成都:四川大学, 2005.XIAO Y M.Study on evaluation and its application of mental worker's mental workload[D].Chengdu:Sichuan University, 2005(in Chinese). [17] ENDSLEY M R, GARLAND D J.Situation awareness analysis and measurement[M].Boca Raton:CRC Press, 2000:203-223. [18] 侯建.月球车立体视觉与视觉导航方法研究[D].哈尔滨:哈尔滨工业大学, 2007.HOU J.Research on stereo vision and visual navigation for a lunar rover[D].Harbin:Harbin Institute of Technology, 2007(in Chinese). [19] 唐志勇, 张力.数字化控制系统中操纵员心理负荷及其影响因素分析[J].价值工程, 2008, 23(5):53-56. http://www.cnki.com.cn/Article/CJFDTOTAL-JZGC201201007.htmTANG Z Y, ZHANG L.Analysis of operators' mental workload and its influencing factors in digitalization control system[J].Value Engineering, 2008, 23(5):53-56(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JZGC201201007.htm [20] 李鹏程, 张力, 戴立操, 等.核电厂数字化人-机界面特征对人因失误的影响研究[J].核动力工程, 2011, 32(1):48-52.LI P C, ZHANG L, DAI L C, et al.Effects of digital human-machine interface characteristics on human error in nuclear power plants[J].Nuclear Power Engineering, 2011, 32(1):48-52(in Chinese). [21] 邓成龙.视觉注意影响距离感知[D].上海:华东师范大学, 2014.DENG C L.Visual attention can affect perceived distance[D].Shanghai:East China Normal University, 2014(in Chinese). 期刊类型引用(4)
1. 朱淑佩,唐伟财,王笃明,肖毅. 基本认知与操作能力对机械臂精细对接任务绩效及人误的影响. 载人航天. 2022(01): 47-54 .  百度学术
百度学术2. 潘丹,田志强,王磊,薛书骐,张宜静,刘梦迪. 机械臂遥操作典型任务特征分析与仿真实现. 人类工效学. 2018(03): 57-63 . 百度学术3. 孟令浩,刘宏艳,胡信奎,刘宏钰,胡治国. 产品设计中的人的因素. 人类工效学. 2018(04): 71-74+80 . 百度学术4. 唐伟财,陈善广,肖毅,姜国华,田志强. 机械臂遥操作任务过程脑力负荷研究. 载人航天. 2017(05): 688-696 . 百度学术其他类型引用(2)
-

 下载:
下载:
 下载:
下载:



 百度学术
百度学术
 点击查看大图
点击查看大图

计量
- 文章访问数: 939
- HTML全文浏览量: 135
- PDF下载量: 549
- 被引次数: 6
