



-
摘要:
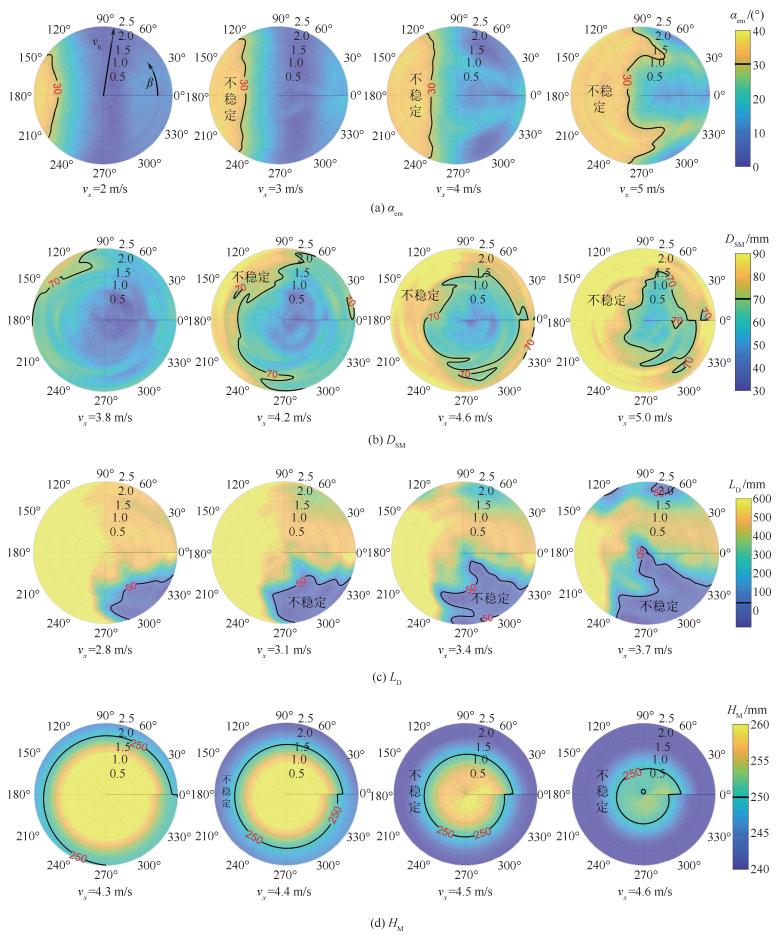
以触地关机软着陆模式下的某型着陆器为研究对象,建立其软着陆过程的动力学仿真模型。基于仿真模型,结合优化方法与多岛遗传算法(MIGA)确定了着陆器的极恶劣地形工况参数,并利用径向基函数(RBF)神经网络建立了反映极恶劣工况下着陆器速度参数与稳定性指标值之间映射关系的代理模型。将着陆器速度参数做离散化处理得到样本点,利用神经网络模型计算了各样本点对应的软着陆稳定性指标值,基于计算结果给出了各项软着陆稳定性指标的云图和三维速度稳定性边界,并得到了综合各项稳定性指标的着陆器速度稳定性边界。分析结果可直观地确定保证着陆器安全着陆的速度取值范围,为着陆器速度的合理控制提供参考。
-
关键词:
- 腿式着陆器 /
- 触地关机 /
- 软着陆 /
- 径向基函数(RBF)神经网络 /
- 稳定性边界
Abstract:A lander in the soft landing mode of shutdown at touchdown is taken as the research object, and the dynamic simulation model of its soft landing process is established. Based on the simulation model, the parameters of the worst landing conditions are obtained by combining optimization method and multi-island genetic algorithm (MIGA). The radial basis function (RBF) neural network is used to establish a surrogate model which reflects the mapping relationship between the lander's velocity parameter and the value of stability indicator. The sample points are obtained by discretizing the velocity parameters of the lander, and the soft landing stability performance of each sample point are calculated by using the neural network model. Based on the calculation results, the contour and the three-dimensional velocity stability boundary of each soft landing stability indicator are given, and then a comprehensive stability boundary of lander velocity is obtained. The analysis results can intuitively determine the range of velocity for safe landing, which provides reference for the rational control of lander velocity.
-

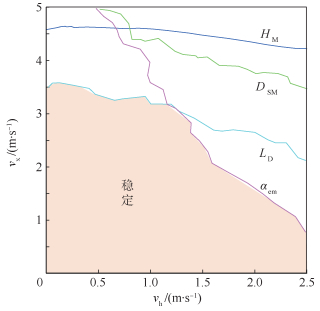
图 9 各指标下着陆速度三维稳定性边界
Figure 9. 3D stability boundary determined by landing velocity concerning different indicators

图 10 综合指标下着陆速度三维稳定性边界
Figure 10. 3D stability boundary determined by landing velocity considering comprehensive indicators
表 1 优化参数设置
Table 1. Setting of optimal parameters
参数 数值 岛屿种群规模 10 岛数 10 进化代数 25 交叉概率 0.9 迁移概率 0.01 迁移间隔 4  下载: 导出CSV
下载: 导出CSV
表 2 极恶劣工况
Table 2. Worst landing conditions
指标 最优解X*=[α, K, ψ, β]T max αem [3.713, 1, 0.624, 174.35]T max DSM [1.995, 0, 17.32, 138.89]T min LD [12.00, 1, 35.51, 290.63]T min HM [0.405, 0, 13.98, 226.51]T 注:α、ψ、β单位为(°);K无量纲。
下载: 导出CSV
-
[1] 杨建中, 曾福明, 满剑锋, 等.嫦娥三号着陆器着陆缓冲系统设计与验证[J].中国科学:技术科学, 2014, 44(5):440-449. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201405002.htmYANG J Z, ZENG F M, MAN J F, et al.Design and verification of the landing impact attenuation system for Chang'E-3 lander[J].Scientia Sinica Techologica, 2014, 44(5):440-449(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201405002.htm [2] CHEN J B, NIE H, WAN J L, et al.Investigation on landing impact dynamic and low-gravity experiments for deep space lander[J].Science China (Physics, Mechanics & Astronomy), 2014, 57(10):1987-1997. doi: 10.1007/s11433-014-5423-3 [3] 孙泽洲, 张熇, 贾阳, 等.嫦娥三号探测器地面验证技术[J].中国科学:技术科学, 2014, 44(4):369-376. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201404005.htmSUN Z Z, ZHANG H, JIA Y, et al.Ground validation technologies for Chang'E-3 lunar spacecraft[J].Scientia Sinica Techologica, 2014, 44(4):369-376(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201404005.htm [4] 逯运通, 宋顺广, 王春洁, 等.基于刚柔耦合模型的月球着陆器动力学分析[J].北京航空航天大学学报, 2010, 36(11):1348-1352. http://bhxb.buaa.edu.cn/CN/abstract/abstract11816.shtmlLU Y T, SONG S G, WANG C J, et al.Dynamic analysis for lunar lander based on rigid-flexible coupled model[J].Journal of Beijing University of Aeronautics and Astronautics, 2010, 36(11):1348-1352(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract11816.shtml [5] MAEDA T, OTSUKI M, HASHIMOYO T, et al.Attitude stabilization for lunar and planetary lander with variable damper[J].Journal of Guidance, Control, and Dynamics, 2016, 39(8):1790-1804. doi: 10.2514/1.G000325 [6] 曾福明, 杨建中, 朱汪, 等.月球着陆器着陆缓冲性能研究[J].航天器工程, 2010, 19(5):43-49. doi: 10.3969/j.issn.1673-8748.2010.05.008ZENG F M, YANG J Z, ZHU W, et al.Research on landing impact attenuation performance of lunar lander[J].Spacecraft Engineering, 2010, 19(5):43-49(in Chinese). doi: 10.3969/j.issn.1673-8748.2010.05.008 [7] 岳帅, 聂宏, 张明, 等.临近空间载人舱着陆动力学及影响因素分析[J].宇航学报, 2018, 39(3):264-274. http://d.old.wanfangdata.com.cn/Periodical/yhxb201803004YUE S, NIE H, ZHANG M, et al.Analysis on landing dynamics and influence factors of near space manned capsule[J].Journal of Astronautics, 2018, 39(3):264-274(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201803004 [8] LAVENDER R E.Monte Carlo approach to touchdown dynamics for soft lunar landing: NASA TN D-3117[R].Washington, D.C.: NASA, 1965. [9] ROGERS W F.Apollo experience report: Lunar module landing gear subsystem: NASA TN D-6850[R].Washington, D.C.: NASA, 1972. [10] 朱汪, 杨建中.月球着陆器软着陆机构着陆稳定性仿真分析[J].宇航学报, 2009, 30(5):1792-1796. doi: 10.3873/j.issn.1000-1328.2009.05.008ZHU W, YANG J Z.Touch down stability simulation of landing gear system for lunar lander[J].Journal of Astronautics, 2009, 30(5):1792-1796(in Chinese). doi: 10.3873/j.issn.1000-1328.2009.05.008 [11] LIU Y, SONG S, LI M, et al.Landing stability analysis for lunar landers using computer simulation experiments[J].International Journal of Advanced Robotic Systems, 2017, 14(6):1-15. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=f570f74d9278aa7e10f91ed5b9b0fcfc [12] 吴宏宇, 王春洁, 丁宗茂, 等.两种着陆模式下的着陆器缓冲机构构型优化[J].宇航学报, 2017, 38(10):1032-1040. http://d.old.wanfangdata.com.cn/Periodical/yhxb201710003WU H Y, WANG C J, DING Z M, et al.Configuration optimization of landing gear under two kinds of landing modes[J].Journal of Astronautics, 2017, 38(10):1032-1040(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201710003 [13] WU H, WANG C, DING J, et al.Dynamics simulation analysis for novel lander based on two kinds of landing mode[C]//International Conference on Measuring Technology and Mechatronics Automation.Piscataway, NJ: IEEE Press, 2017: 8-12. [14] 丁宗茂, 王春洁, 吴宏宇, 等.探测器触地关机软着陆稳定性分析[J].北京航空航天大学学报, 2018, 44(3):614-620. http://bhxb.buaa.edu.cn/CN/abstract/abstract14368.shtmlDING Z M, WANG C J, WU H Y, et al.Stability analysis of explorer in soft landing mode of engine shutdown at touchdown[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):614-620(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract14368.shtml [15] 陈立平.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社, 2005:25-30.CHEN L P.Mechanical system dynamics analysis and ADAMS application tutorial[M].Beijing:Tsinghua University Press, 2005:25-30(in Chinese). [16] 张熇, 蔡国飙, 许映乔, 等.嫦娥三号着陆器软着陆过程中羽流仿真分析及试验研究[J].中国科学:技术科学, 2014, 44(4):344-352. http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201404002.htmZHANG H, CAI G B, XU Y Q, et al.Simulation and experimental study of the plume during the Chang'E-3 lunar landing[J].Scientia Sinica Techologica, 2014, 44(4):344-352(in Chinese). http://www.cnki.com.cn/Article/CJFDTOTAL-JEXK201404002.htm [17] 张洪华, 关轶峰, 黄翔宇, 等.嫦娥三号着陆器动力下降的制导导航与控制[J].中国科学:技术科学, 2014, 44(4):377-384. http://cdmd.cnki.com.cn/Article/CDMD-10287-1016791493.htmZHANG H H, GUAN Y F, HUANG X Y, et al.Guidance navigation and control for Chang'E-3 powered descent[J].Scientia Sinica Techologica, 2014, 44(4):377-384(in Chinese). http://cdmd.cnki.com.cn/Article/CDMD-10287-1016791493.htm [18] CAROZZA M, RAMPONE S.Function approximation from noisy data by an incremental RBF network[J].Pattern Recognition, 1999, 32(12):2081-2083. doi: 10.1016/S0031-3203(99)00101-6 -

 下载:
下载:







 点击查看大图
点击查看大图

计量
- 文章访问数: 795
- HTML全文浏览量: 86
- PDF下载量: 323
- 被引次数: 0
