



-
摘要:
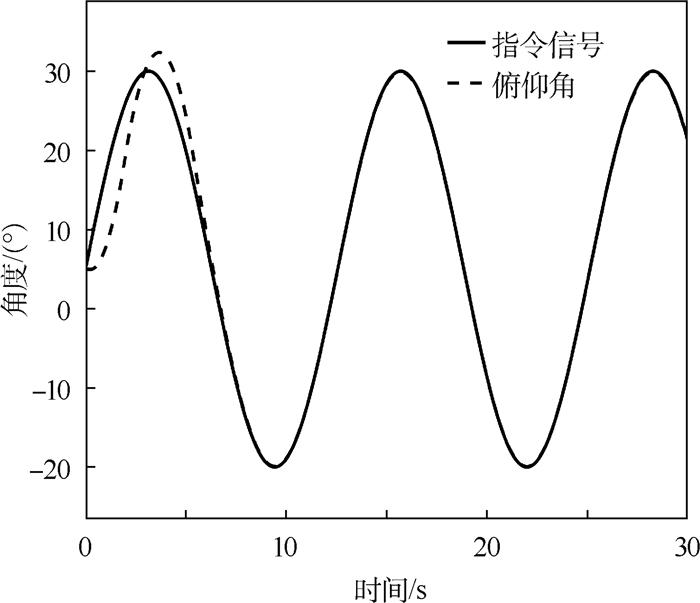
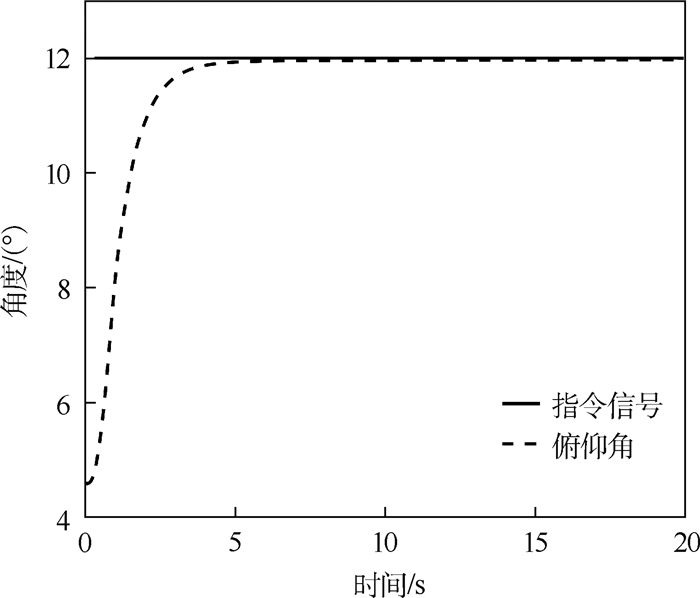
为了完成对一类反馈型非线性系统的控制,研究了该类非线性系统。首先,根据LaSalle不变性原理论证了一类自治系统收敛的引理。然后,引入误差函数,通过误差函数的Lyapunov函数寻找使得误差函数渐近稳定的控制器,再根据引理得出系统状态所跟踪的轨迹全部收敛,从而使得系统状态均有界,系统的输出趋于输入;论述了控制器使系统状态稳定的条件,给出了闭环系统稳定性的证明。最后,给出了一个固定翼飞机纵向运动飞行控制系统的算例,并且按照所提的方法设计了控制器,在MATLAB的Simulink模块下进行了仿真验证。结果表明,对于阶跃信号和正弦信号,所提出的控制方法能够使得飞机俯仰角快速收敛跟踪指令。
-
关键词:
- 非线性系统 /
- 反馈 /
- Lyapunov方法 /
- 系统稳定性 /
- 飞行控制系统
Abstract:In order to achieve the control of a class of nonlinear systems in feedback form, the system is studied. First, according to LaSalle's invariance principle, the convergence of a class of autonomous systems is proved. The error function is introduced, and the Lyapunov function of the error function is used to find the controller which makes the error function asymptotically stable. Then, according to the lemma, the trajectories tracked by the system states are all converged, so that the system states are bounded and the output of the system converges to input. The condition and the proof of the stability of the closed-loop system are given. Finally, an example of longitudinal dynamics of an fixed-wing aircraft flight control system is presented, and the controller is designed according to the proposed method. The simulation is verified under the Simulink module of MATLAB. The results show that, for step signals and sinusoidal signals, the proposed controller can enable the pitch angle of aircraft to quickly converge the tracking command.
-
Key words:
- nonlinear systems /
- feedback /
- Lyapunov methods /
- system stability /
- flight control systems
-
[1] WANG C, WEN C, LIN Y.Adaptive actuator failure compensation for a class of nonlinear systems with unknown control direction[J].IEEE Transactions on Automatic Control, 2016, 62(1):385-392. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=8f53d1d0d216d8d486753114398e80ca [2] CAI J, WEN C, SU H, et al.Adaptive backstepping control for a class of nonlinear systems with non-triangular structural uncertainties[J].IEEE Transactions on Automatic Control, 2016, 62(10):5220-5226. https://ieeexplore.ieee.org/document/7742369/ [3] FURQON R, CHEN Y J, TANAKA M, et al.An SOS-based control Lyapunov function design for polynomial fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy Systems, 2017, 25(4):775-787. doi: 10.1109/TFUZZ.2016.2578339 [4] ZHANG W, LI C, HUANG T, et al.Stability and synchronization of memristor-based coupling neural networks with time-varying delays via intermittent control[J].Neurocomputing, 2016, 173(P3):1066-1072. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=25d718027a0364cf625ecd4ddcfc3e7e [5] LOZANO R, BROGLIATO B.Adaptive control of robot manipulators with flexible joints[J].IEEE Transactions on Automatic Control, 1992, 37(2):174-181. doi: 10.1109/9.121619 [6] KOKOTOVIC P.The joy of feedback:Nonlinear and adaptive[J].IEEE Control Systems Magazine, 1992, 12(3):7-17. doi: 10.1109/37.165507 [7] KOKOTOVIC P, ARCAK M.Constructive nonlinear control:A historical perspective[J].Automatica, 2001, 37(5):637-662. doi: 10.1016/S0005-1098(01)00002-4 [8] QU Z.Robust control of nonlinear uncertain systems under generalized matching conditions[J].IEEE Transactions on Automatic Control, 1993, 40(8):1453-1460. doi: 10.1016-0005-1098(93)90101-X/ [9] HOU Z G, ZOU A M, CHENG L, et al.Adaptive control of an electrically driven nonholonomic mobile robot via backstepping and fuzzy approach[J].IEEE Transactions on Control Systems Technology, 2009, 17(4):803-815. doi: 10.1109/TCST.2009.2012516 [10] 李海涛, 闫斌.基于自适应反步的DGMSCMG框架伺服系统控制方法[J].北京航空航天大学学报, 2016, 42(4):703-710. https://bhxb.buaa.edu.cn/CN/abstract/abstract13864.shtmlLI H T, YAN B.Adaptive backstepping control method used in DGMSCMG gimbal servo system[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(4):703-710(in Chinese). https://bhxb.buaa.edu.cn/CN/abstract/abstract13864.shtml [11] 方一鸣, 任少冲, 王志杰, 等.永磁同步电动机转速自适应模糊Backstepping控制[J].电机与控制学报, 2011, 15(6):97-102. doi: 10.3969/j.issn.1007-449X.2011.06.017FANG Y M, REN S C, WANG Z J, et al.Adaptive fuzzy Backstepping control for speed of permanent magnet synchronous motor[J].Electric Machines and Control, 2011, 15(6):97-102(in Chinese). doi: 10.3969/j.issn.1007-449X.2011.06.017 [12] LASALLE J P.The extent of asymptotic stability[J].Proceedings of the National Academy of Sciences of the United States of America, 1960, 46(3):363-365. doi: 10.1073/pnas.46.3.363 [13] 徐军, 杨亚炜.飞机电传操纵系统[M].北京:北京理工大学出版社, 2018:65-74.XU J, YANG Y W.Aircraft fly-by-wire system[M].Beijing:Beijing Institute of Technology Press, 2018:65-74(in Chinese). [14] XU H, MIRMIRANI M, IOANNOU P.Robust neural adaptive control of a hypersonic aircraft: AIAA-2003-5641[R].Reston: AIAA, 2003. [15] WANG Q, STENGEL R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance, Control, and Dynamics, 2000, 23(1):15-26. -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 676
- HTML全文浏览量: 62
- PDF下载量: 352
- 被引次数: 0
