



-
摘要:
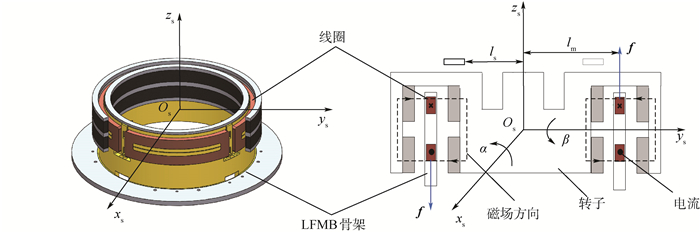
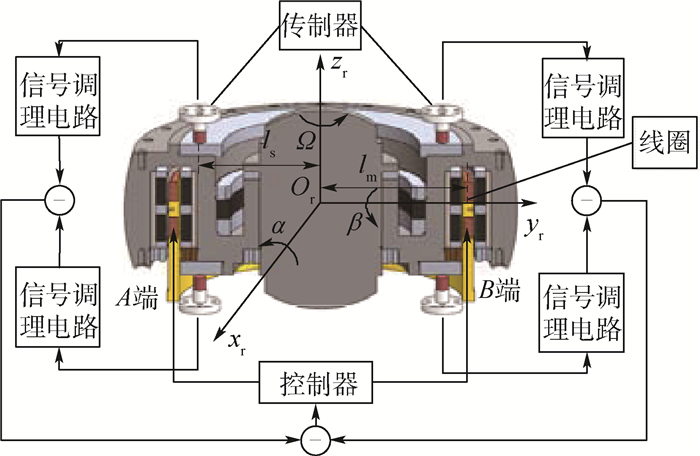
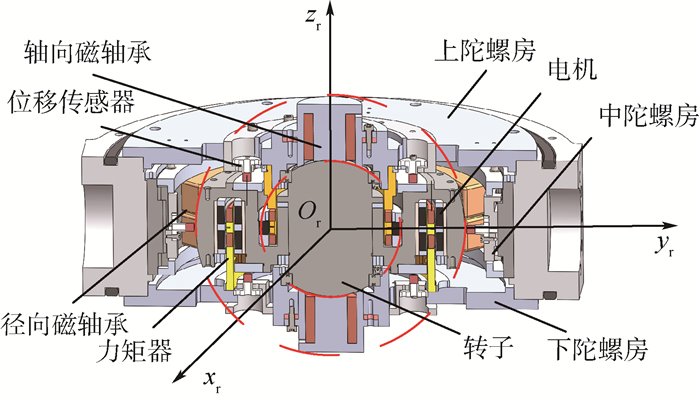
磁悬浮控制敏感陀螺(MSCSG)是一种将姿态控制和姿态测量功能合二为一的新型陀螺,采用洛伦兹力磁轴承(LFMB)控制转子径向偏转。针对MSCSG 2个测量轴之间存在耦合的问题,提出了一种基于逆系统解耦的测量方法。首先,分析了MSCSG的结构组成,在此基础上建立了LFMB-转子系统动力学模型,推导了MSCSG陀螺进行两自由度姿态测量的工作原理;然后,分析了2个测量轴之间的耦合关系,进而提出采用逆系统对2个测量轴进行解耦。最后,对所提方法的有效性进行了仿真验证。仿真结果表明:在所提解耦方法作用下,2个测量轴之间的耦合效果得到了很好的抑制,测量精度得到了一定的提高。
-
关键词:
- 磁悬浮控制敏感陀螺(MSCSG) /
- 洛伦兹力磁轴承(LFMB) /
- 姿态测量 /
- 逆系统解耦 /
- 径向偏转
Abstract:Magnetically suspended control and sense gyroscope (MSCSG) is a new type of gyroscope which combines attitude control and attitude measurement functions and uses Lorentz force magnetic bearings (LFMBs) to drive the rotor to tilt. To solve the problem of coupling between two measuring axes of MSCSG, a measurement method based on inverse system decoupling is presented. First, the basic structure of MSCSG composition was analyzed. Then, the LFMB-rotor system dynamics model was established based on the basic structure of MSCSG composition. The principle of MSCSG for two-degree-of-freedom attitude measurement was deduced and the coupling between two measuring axes of MSCSG was analyzed. The inverse system is used to decouple two measuring axes of MSCSG. Finally, the effectiveness of the proposed method is verified by simulation. The simulation results show that the coupling effect between the two measuring axes of MSCSG is restrained well and the measurement accuracy is improved.
-

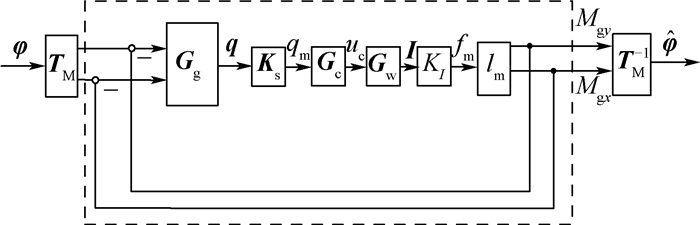
图 5 采用逆系统解耦的MSCSG原理示意图
Figure 5. Schematic diagram of MSCSG principle with inverse system decoupling

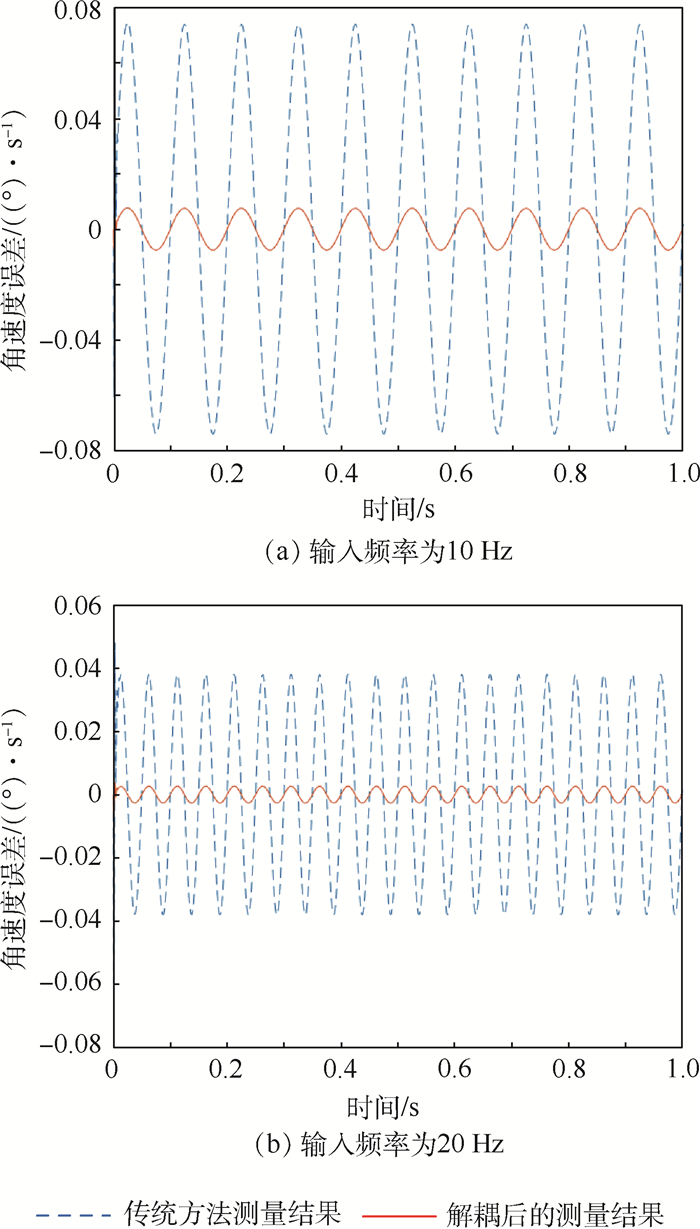
图 6 两种方法在输入频率为10 Hz和20 Hz时的测量误差比较曲线
Figure 6. Comparison curves of measurement errors between two methods at input frequency of 10 Hz and 20 Hz

图 7 两种方法在输入频率为10 Hz和20 Hz时的测量耦合比较曲线
Figure 7. Comparison curves of measurement coupling between two methods at input frequency of 10 Hz and 20 Hz
表 1 MSCSG系统仿真参数
Table 1. MSCSG system simulation parameters
参数 数值 N/匝 100 L/mm 80 Jz/(kg·m2) 0.017 8 Jr/(kg·m2) 0.006 2 Ω/Hz 83.3 I/A 0.5 lm/mm 59 ls/mm 78.7  下载: 导出CSV
下载: 导出CSV
-
[1] YU Y J, FANG J C, YANG Z H.Torque distribution of the integrated magnetically suspended inertia actuator for attitude maneuvers[J].Acta Astronautica, 2016, 119:71-78. doi: 10.1016/j.actaastro.2015.11.008 [2] 刘强, 赵勇, 代峰燕, 等.磁悬浮陀螺飞轮用隐式洛伦兹力磁轴承[J].光学精密工程, 2018, 26(2):399-409. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201802018LIU Q, ZHAO Y, DAI F Y, et al.Implicit lorentz force magnetic bearing for magnetically suspended gyro flywheel[J].Optics and Precision Engineering, 2018, 26(2):399-409(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201802018 [3] CHEN X C, CAI Y W, REN Y, et al.Spacecraft angular rates and angular acceleration estimation using single-gimbal magnetically suspended control moment gyros[J].IEEE Transactions on Industrial Electronics, 2019, 66(1):440-450. doi: 10.1109/TIE.2018.2826468 [4] 夏长峰, 蔡远文, 任元, 等.磁悬浮控制敏感陀螺转子前馈解耦内模控制[J].北京航空航天大学学报, 2018, 44(3):480-488. doi: 10.13700/j.bh.1001-5965.2017.0190XIA C F, CAI Y W, REN Y, et al.Feedforward decoupling and internal model control for rotor of magnetically suspended control and sensing gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(3):480-488(in Chinese). doi: 10.13700/j.bh.1001-5965.2017.0190 [5] 任元, 王卫杰, 刘强, 等.一种磁悬浮控制敏感陀螺: 201510006597.5[P].2017-04-28.REN Y, WANG W J, LIU Q, et al.A kind of magnetically suspended control and sensing gyroscopic: 201510006597.5[P].2017-04-28(in Chinese). [6] 夏长峰, 蔡远文, 任元, 等.MSCSG转子不平衡振动原理分析与建模[J].北京航空航天大学学报, 2018, 44(11):78-85. doi: 10.13700/j.bh.1001-5965.2018.0044XIA C F, CAI Y W, REN Y, et al.Principle analysis and modeling of rotor imbalance vibration in magnetically suspended control and sensing gyroscope[J].Journal of Aeronautics and Astronautics, 2018, 44(11):78-85(in Chinese). doi: 10.13700/j.bh.1001-5965.2018.0044 [7] REN Y, CHEN X C, CAI Y W, et al.Attitude-rate measurement and control integration using magnetically suspended control & sensitive gyroscopes[J].IEEE Transactions on Industrial Electronics, 2018, 65(6):4921-4932. doi: 10.1109/TIE.2017.2772161 [8] 夏长峰, 蔡远文, 任元, 等.MSCSG转子系统的扩展双频Bode图稳定性分析方法[J].宇航学报, 2018, 39(2):168-176. http://d.old.wanfangdata.com.cn/Periodical/yhxb201802007XIA C F, CAI Y W, REN Y, et al.Extended dual-frequency Bode diagram stability analysis method for mscsg rotor system[J].Journal of Astronautics, 2018, 39(2):168-176(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201802007 [9] 崔培玲, 盖玉欢, 房建成, 等.主被动磁悬浮转子的不平衡振动自适应控制[J].光学精密工程, 2015, 23(1):122-131. http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201501017CUI P L, GAI Y H, FANG J C, et al.Unbalanced vibration adaptive control of active and passive magnetically suspended rotor[J].Optics and Precision Engineering, 2015, 23(1):122-131(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/gxjmgc201501017 [10] CUI P L, LI S, ZHAO G Z, et al.Suppression of harmonic current in active-passive magnetically suspended CMG using improved repetitive controller[J].IEEE/ASME Transactions on Mechatronics, 2016, 21(4):2132-2141. doi: 10.1109/TMECH.2016.2555858 [11] 边志强, 蔡陈生, 吕旺, 等.遥感卫星高精度高稳定度控制技术[J].上海航天, 2014, 31(3):24-33. doi: 10.3969/j.issn.1006-1630.2014.03.005BIAN Z Q, CAI C S, LV W, et al.High precision and high stability control technology for remote sensing satellites[J].Aerospace Shanghai, 2014, 31(3):24-33(in Chinese). doi: 10.3969/j.issn.1006-1630.2014.03.005 [12] CHEN X C, CAI Y W, REN Y, et al.Spacecraft angular acceleration estimation using single-gimbal magnetically suspended control moment gyros[J].IEEE Transactions on Industrial Electronics, 2019, 66(1):440-450. doi: 10.1109/TIE.2018.2826468 [13] 刘彬, 房建成, 刘刚.一种磁悬浮陀螺飞轮方案设计与关键技术分析[J].航空学报, 2011, 32(8):1478-1487. http://d.old.wanfangdata.com.cn/Periodical/hkxb201108012LIU B, FANG J C, LIU G.A kind of scheme design and key technologies analysis of a magnetically suspended gyro flywheel[J].Acta Aeronautica et Astronautica Sinica, 2011, 32(8):1478-1487(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/hkxb201108012 [14] GEORGE T, WILLIAM W, SATYA P, et al.GyroWheelTM-An innovative new actuator/sensor for 3-axis spacecraft attitude control[C]//Proceedings of the 13th Annual AIAA/USU Conference on Small Satellites.Reston: AIAA, 1999: 1-13. [15] 房建成, 任元.磁悬浮控制力矩陀螺技术[M].北京:国防工业出版社, 2014.FANG J C, REN Y.Magnetically suspended control momentum gyroscope technology[M].Beijing:National Defense Industry Press, 2014(in Chinese). [16] FANG J C, ZHENG S Q, HAN B C.Attitude sensing and dynamic decoupling based on active magnetic bearing of MSDGCMG[J].IEEE Transactions on Instrumentation & Measurement, 2012, 61(2):338-348. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=087cf6b17c55b1f82be7376e12e79475 [17] 李明辉, 云卫涛, 张孝杰.基于双模糊解耦控制的小型汽轮机负荷控制[J].热力发电, 2018, 47(1):112-118. http://d.old.wanfangdata.com.cn/Periodical/rlfd201801018LI M H, YUN W T, ZHANG X J.Load control of small steam turbine based on double fuzzy decoupling control[J].Thermal Power Generation, 2018, 47(1):112-118(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/rlfd201801018 [18] 张国宁, 黄湘远.神经网络在复杂系统建模中的应用[J].科技导报, 2018, 36(12):66-70. http://d.old.wanfangdata.com.cn/Periodical/jsjgcyyy200403068ZHANG G N, HUANG X Y.Application of neural network in modeling of complex systems[J].Science & Technology Review, 2018, 36(12):66-70(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/jsjgcyyy200403068 [19] 郭艳玲, 许李尚, 奚文龙, 等.基于滑模解耦的EPS用PMSM鲁棒预测电流控制[J].微特电机, 2018, 46(2):42-47. doi: 10.3969/j.issn.1004-7018.2018.02.011GUO Y L, XU L S, XI W L, et al.PMSM robust predictive current control for EPS based on sliding mode decoupling[J].Small & Special Electrical Machines, 2018, 46(2):42-47(in Chinese). doi: 10.3969/j.issn.1004-7018.2018.02.011 [20] FANG J C, REN Y.Decoupling control of magnetically suspended rotor system in control moment gyros based on an inverse system method[J].IEEE/ASME Transactions on Mechatronics, 2012, 17(6):1133-1144. doi: 10.1109/TMECH.2011.2159618 -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 741
- HTML全文浏览量: 139
- PDF下载量: 311
- 被引次数: 0
