



-
摘要:
为解决多机编队目标跟踪过程中存在的机间通信和控制更新频繁的问题,提出了一种具有事件触发机制的多机编队目标跟踪控制算法。首先,给出了一种具有事件触发策略的编队队形描述与目标跟踪一体化算法,简化了算法设计的复杂度,并使触发机制的工作过程更加直观;其次,给出了分布式目标跟踪控制律,并仅利用状态估计信息设计了事件触发函数,使无人机间通信与控制更新问题转换为判别触发函数的取值问题,同时设计了最小触发间隔系数,避免了可能存在的"Zeno行为";最后,以编队不同的运动模式对算法进行了仿真验证。研究结果表明:所提算法能使无人机编队在机间通信与控制更新次数明显减少的情况下跟踪上目标。
Abstract:In order to solve the problem of frequent updating of information between UAVs and control input in multi-UAV formation target tracking, this paper proposes a multi-UAV formation target tracking control algorithm based on event-triggered mechanism. Firstly, a new integrated method of formation description and target tracking with event-triggered strategy is presented, which simplifies the complexity of algorithm design and makes the working process of triggered mechanism more intuitive. Secondly, distributed target tracking control law is designed, and event-triggered function is designed only based on estimated state value, so that the problem of updating communication and control input between UAVs is transformed into the problem of determining the value of triggered function. At the same time, the minimum triggered interval coefficient is designed to avoid the possible "Zeno behavior". Finally, the algorithm is verified by simulation with different formation motion modes. The results show that the proposed algorithm can make UAV formation track the target when the number of inter-aircraft communication and control update is significantly reduced.
-
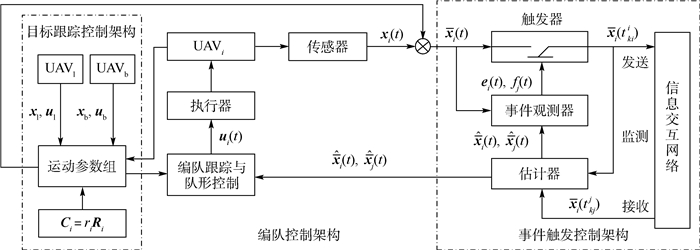
图 1 基于事件触发的编队目标跟踪控制示意图
Figure 1. Schematic diagram of formation target tracking control based on event-triggered mechanism
表 1 有无触发机制下的时间对比(情况1)
Table 1. Time comparison with and without triggered mechanism (Case 1)
情况 UAV 触发次数 平均间隔/s Δkiti决定的次数 τi决定的次数 采用零阶保持器情况 事件触发 1 367 0.081 7 266 101 577 2 355 0.084 5 272 83 601 3 357 0.084 0 293 64 586 4 375 0.080 0 265 110 600 无事件触发 1~4 30 000 0.001 0 注:Δtkii决定的次数表示由触发函数决定的触发次数;τi决定的次数表示由最小触发时间间隔决定的触发次数。  下载: 导出CSV
下载: 导出CSV
表 2 有无触发机制下的时间对比(情况2)
Table 2. Time comparison with and without triggered mechanism (Case 2)
情况 UAV 触发次数 平均间隔/s Δtkii决定的次数 τi决定的次数 事件触发 1 618 0.048 5 89 529 2 626 0.047 9 83 543 3 625 0.048 0 72 553 4 605 0.049 6 65 540 无事件触发 1~4 30 000 0.001 0
下载: 导出CSV
-
[1] GUO K, LI X, XIE L. Ultra-wideband and odometry-based cooperative relative localization with application to multi-UAV formation control[J]. IEEE Transactions on Cybernetics, 2020, 50(6): 2590-2603. doi: 10.1109/TCYB.2019.2905570 [2] WALTER V, STAUB N, FRANCHI A, et al. UVDAR system for visual relative localization with application to leader-follower formations of multirotor UAVs[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2637-2644. doi: 10.1109/LRA.2019.2901683 [3] 张毅, 方国伟, 杨秀霞. 指令决策下的多UAV协同跟踪[J]. 飞行力学, 2020, 38(4): 28-33.ZHANG Y, FANG G W, YANG X X. Multiple UAVs coordinated tracking under command decision[J]. Flight Dynamics, 2020, 38(4): 28-33(in Chinese). [4] OH H, KIM S. Persistent standoff tracking guidance using constrained particle filter for multiple UAVs[J]. Aerospace Science and Technology, 2019, 84: 257-264. doi: 10.1016/j.ast.2018.10.016 [5] ZHANG M, LIU H H. Cooperative tracking a moving target using multiple fixed-wing UAVs[J]. Journal of Intelligent & Robotic Systems, 2016, 81(3-4): 505-529. [6] NOWZARI C, CORTÉS J. Distributed event-triggered coordination for average consensus on weight-balanced digraphs[J]. Automatica, 2016, 68: 237-244. doi: 10.1016/j.automatica.2016.01.069 [7] FAN Y, YANG Y, ZHANG Y. Sampling-based event-triggered consensus for multi-agent systems[J]. Neurocomputing, 2016, 191: 141-147. doi: 10.1016/j.neucom.2015.12.102 [8] NOWZARI C, GARCIA E, CORTÉS J. Event-triggered communication and control of networked systems for multi-agent consensus[J]. Automatica, 2019, 105: 1-27. doi: 10.1016/j.automatica.2019.03.009 [9] MA Y, ZHAO J. Distributed event-triggered consensus using only triggered information for multi-agent systems under fixed and switching topologies[J]. IET Control Theory and Applications, 2018, 12(9): 1357-1365. doi: 10.1049/iet-cta.2017.1091 [10] YOU X, HUA C, GUAN X. Event-triggered leader-following consensus for nonlinear multiagent systems subject to actuator saturation using dynamic output feedback method[J]. IEEE Transactions on Automatic Control, 2018, 63(12): 4391-4396. doi: 10.1109/TAC.2018.2817160 [11] 陈世明, 邵赛. 基于事件触发非线性多智能体系统的固定时间一致性[J]. 控制理论与应用, 2019, 36(10): 1606-1614. doi: 10.7641/CTA.2019.80742CHEN S M, SHAO S. Distributed event-triggered fixed-time consensus control for multi-agent systems with nonlinear uncertainties[J]. Control Theory & Applications, 2019, 36(10): 1606-1614(in Chinese). doi: 10.7641/CTA.2019.80742 [12] 杨彬, 周琪, 曹亮, 等. 具有指定性能和全状态约束的多智能体系统事件触发控制[J]. 自动化学报, 2019, 45(8): 1527-1535.YANG B, ZHOU Q, CAO L, et al. Event-triggered control for multi-agent systems with prescribed performance and full state constraints[J]. Acta Automatic Sinica, 2019, 45(8): 1527-1535(in Chinese). [13] YANG D, REN W, LIU X, et al. Decentralized event-triggered consensus for linear multi-agent systems under general directed graphs[J]. Automatica, 2016, 69: 242-249. doi: 10.1016/j.automatica.2016.03.003 [14] DENG J, LI K, WU S, et al. Distributed adaptive time-varying formation tracking control for general linear multi-agent systems based on event-triggered strategy[J]. IEEE Access, 2020, 8: 13204-13217. doi: 10.1109/ACCESS.2020.2966042 [15] CHEN S, JIANG H, YU Z. Observer-based event-triggered consensus of leader-following linear multi-agent systems with input saturation and switching topologies[J]. Neurocomputing, 2019, 364: 138-151. doi: 10.1016/j.neucom.2019.07.050 [16] XU B, HE W. Event-triggered cluster consensus of leader-following linear multi-agent systems[J]. Journal of Artificial Intelligence and Soft Computing Research, 2018, 8(4): 293-302. doi: 10.1515/jaiscr-2018-0019 [17] XU W, HO D W, LI L, et al. Event-triggered schemes on leader-following consensus of general linear multiagent systems under different topologies[J]. IEEE Transactions on Cybernetics, 2015, 47(1): 212-223. [18] YE Y, SU H, SUN Y. Event-triggered consensus tracking for fractional-order multi-agent systems with general linear models[J]. Neurocomputing, 2018, 315: 292-298. doi: 10.1016/j.neucom.2018.07.024 [19] 黄红伟, 黄天民, 吴胜, 等. 基于事件触发的二阶多智能体领导跟随一致性[J]. 控制与决策, 2016, 31(5): 835-841.HUANG H W, HUANG T M, WU S, et al. Leader-following consensus of second-order multi-agent systems via event-triggered control[J]. Control and Decision, 2016, 31(5): 835-841(in Chinese). -

 下载:
下载:



 点击查看大图
点击查看大图
计量
- 文章访问数: 731
- HTML全文浏览量: 176
- PDF下载量: 107
- 被引次数: 0
