



-
摘要:
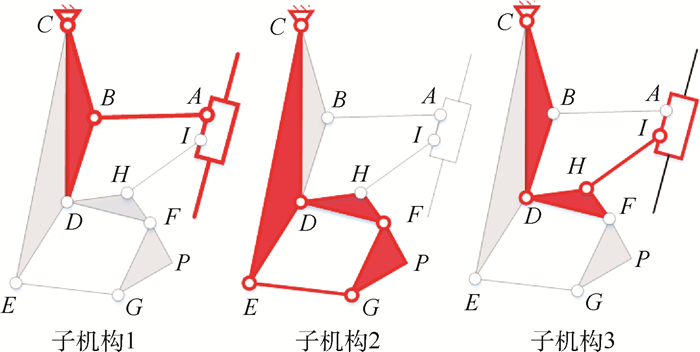
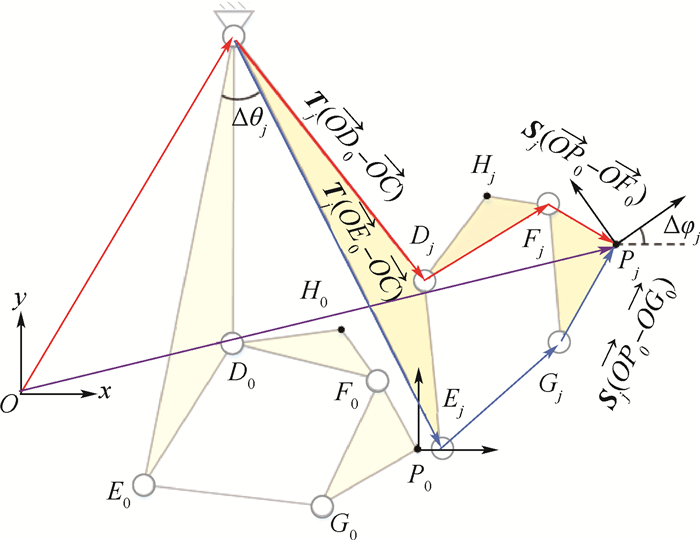
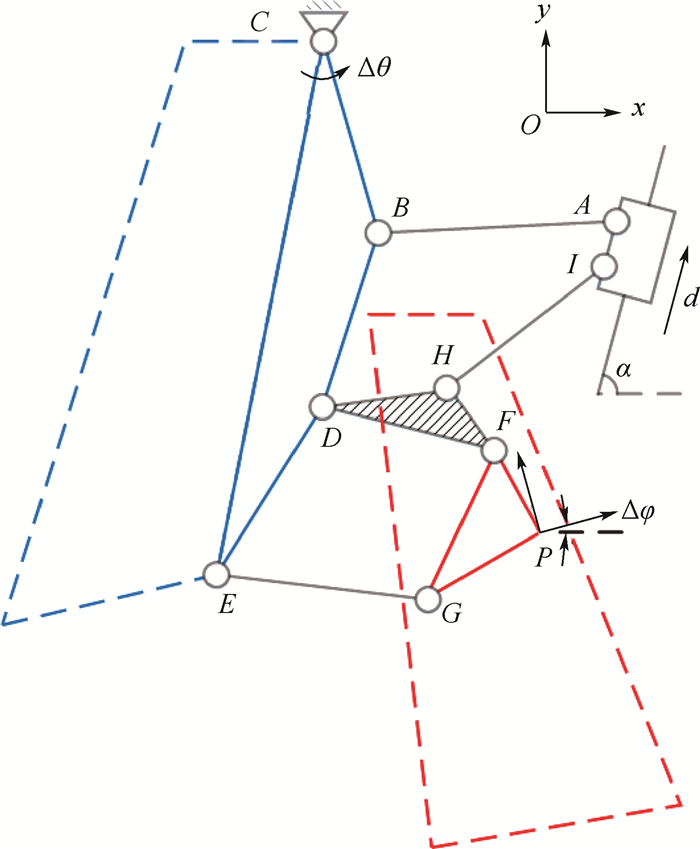
可变后掠翼飞行器通过改变其机翼后掠角,可实现在不同飞行速度条件下,达到最佳飞行状态。为了实现在单驱动下机翼后掠角变化时,同时实现机翼部分蒙皮的展收,基于平面复合连杆机构,提出一种可变后掠翼联动驱动机构。为了解决该机构函数生成与运动生成综合相结合的尺寸综合问题,将复合连杆机构拆分为3个子机构,通过矢量方程法对机构进行分析,建立复合连杆机构的矢量环路方程,并对机构的可动性进行分析。结合机构矢量环路方程,提出一种利用优化算法与运动学分析软件判断机构可动性、优化机构性能的尺寸综合方法。结合相应实例,使用所提方法对机构进行设计,获得了满足可动性要求、尺寸约束,且包络面积最小的机构尺寸构型,证明了所提方法的有效性。
Abstract:By changing the wing sweep angle, the variable wing sweep aircraft can achieve the best flight state under different flight speeds. To complete the folding and unfolding movements of the wing skin when the wing sweep angle changes under the single drive condition, we present a new driving mechanism for the variable sweep aircraft based on the planar compound linkage mechanism. To solve the problem of the combination of function generation and motion generation, the compound mechanism is divided into three sub-mechanisms. Furthermore, the vector loop equation of the compound mechanism is established and the movability of the mechanism is analyzed. Based on the vector loop equation, we propose a synthesis method to judge the movability and optimize the performance of the mechanism by using the optimization algorithm and kinematic analysis software. Finally, an example is presented to validate the effectiveness of the proposed method. The driving mechanism for the variable sweep aircraft is designed by using the proposed method. The designed mechanism meets the movability requirement and size constraint, and has the minimum envelope area, which prove the effectiveness of the method.
-
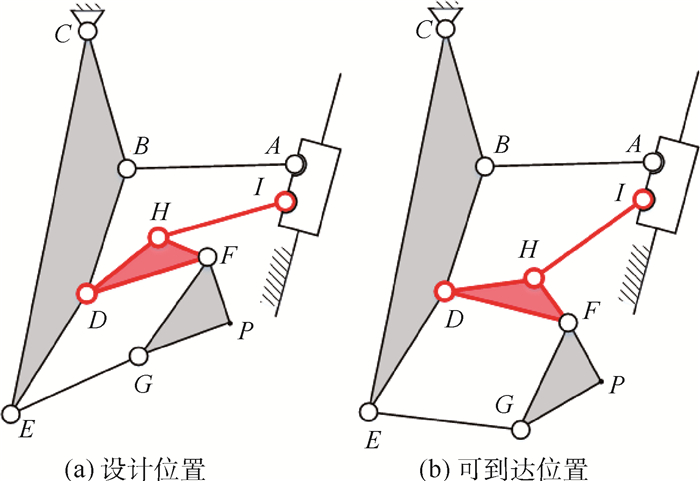
表 1 设计位置
Table 1. Target positions
位置编号 dj/mm Δθj/(°) Δφj/(°) (xPj, yPj)/mm 0 0 0 0 (-50, -550) 1 127.5 7 -15 (30, -455) 2 255 30 -1 (150, -390)  下载: 导出CSV
下载: 导出CSV
表 2 优化前后优化变量取值
Table 2. Values of variables before and after optimization
mm 优化 xB yB xE yE xH xI 优化前 -125 -175 -300 -675 -175 200 优化后 -50 -250 -100 -550 -130.9 191.1
下载: 导出CSV
表 3 优化前后求解变量取值
Table 3. Values of the unknowns before and after optimization
mm 优化 xA yA xF yF xG yG yH yI 优化前 335.0 -174.1 -96.8 -504.1 -111.7 -700.9 -475.6 -201.7 优化后 236.3 -251.4 -96.8 -504.1 -30.9 -598.6 -436.1 -357.3
下载: 导出CSV
表 4 优化前后机构运动情况
Table 4. Motion states before and after optimization
优化 机构运动情况 机构包络/m2 是否出现死点 是否运动到位 优化前 否 否 0.445 优化前 否 是 0.222
下载: 导出CSV
-
[1] 董彦非, 陈元恺, 彭金京. 可变后掠翼技术发展与展望[J]. 飞行力学, 2014, 32(2): 97-100. https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201402001.htmDONG Y F, CHEN Y K, PENG J J. Development and prospect of variable swept wing[J]. Flight Dynamics, 2014, 32(2): 97-100(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-FHLX201402001.htm [2] 赵锁珠, 李占科, 张晓刚. 一种无人机变后掠翼机构的设计与仿真研究[J]. 航空计算技术, 2009, 39(6): 21-24. https://www.cnki.com.cn/Article/CJFDTOTAL-HKJJ200906005.htmZHAO S Z, LI Z K, ZHANG X G. Study of a variable wing sweep mechanism design for unmanned air vehicle[J]. Aeronautical Computing Technique, 2009, 39(6): 21-24(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HKJJ200906005.htm [3] 程勇, 董二宝, 许旻, 等. 可变后掠翼机构设计与仿真[J]. 机械与电子, 2010, 28(2): 20-22. doi: 10.3969/j.issn.1001-2257.2010.02.006CHENG Y, DONG E B, XU M, et al. Structural design and kinematics simulation for the variable swept wing[J]. Machinery and Electronic, 2010, 28(2): 20-22(in Chinese). doi: 10.3969/j.issn.1001-2257.2010.02.006 [4] 陈青欣. 平面多杆机构综合与分析研究[D]. 武汉: 湖北工业大学, 2017: 6-10.CHEN Q X. Synthesis and analysis of multi-bar planar linkages[D]. Wuhan: Hubei University of Technology, 2017: 6-10(in Chinese). [5] RUSSELL K, SODHI R S. Kinematic synthesis of planar five-bar mechanisms for multi-phase motion generation[J]. JSME International Journal, 2004, 47(1): 345-349. doi: 10.1299/jsmec.47.345 [6] SCHREIBER H, MEER K, SCHMITT B J. Dimensional synthesis of planar Stephenson mechanisms for motion generation using circlepoint search and homotopy methods[J]. Mechanism and Machine Theory, 2002, 37(7): 717-737. doi: 10.1016/S0094-114X(02)00016-2 [7] WANG S J, SODHI R S. Kinematic synthesis of adjustable moving pivot four-bar mechanisms for multi-phase motion generation[J]. Mechanism and Machine Theory, 1996, 31(4): 459-474. doi: 10.1016/0094-114X(95)00085-D [8] 崔光珍, 肖艳秋, 王才东, 等. 六杆机构的双目标轨迹综合与运动分析[J]. 机械传动, 2020, 44(12): 73-79. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD202012012.htmCUI G Z, XIAO Y Q, WANG C D, et al. Synthesis and kinematic analysis for bi-objective path of six-bar linkage[J]. Journal of Mechanical Transmission, 2020, 44(12): 73-79(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD202012012.htm [9] WU R, LI R Q, BAI S P. A fully analytical method for coupler-curve synthesis of planar four-bar linkages[J]. Mechanism and Machine Theory, 2021, 155: 104070. doi: 10.1016/j.mechmachtheory.2020.104070 [10] 周洪, 邹慧君. 基于机架杆方向结构误差优化综合曲柄摇杆连续轨迹生成机构[J]. 机械工程学报, 2000, 36(5): 42-45. https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200005011.htmZHOU H, ZOU H J. Optimal synthesis of crank-rocker linkages for continuous path generation using orientational structural error of the fixed link[J]. Journal of Mechanical Engineering, 2000, 36(5): 42-45(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXXB200005011.htm [11] 陈青欣, 王君, 汪泉, 等. 一种平面曲柄滑块五杆机构的路径生成方法[J]. 湖北工业大学学报, 2017, 32(1): 101-104. https://www.cnki.com.cn/Article/CJFDTOTAL-HBGX201701026.htmCHEN Q X, WANG J, WANG Q, et al. A method for the path generation of planar five-bar slider-crank mechanisms[J]. Journal of Hubei University of Technology, 2017, 32(1): 101-104(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HBGX201701026.htm [12] 张春, 胡小春, 林佳裔. 平面复合连杆机构设计及可动性分析[J]. 机械设计与制造, 2020(1): 48-51. https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202001014.htmZHANG C, HU X C, LIN J Y. The design and movability analysis of planar combined bar mechanism[J]. Machinery Design and Manufacture, 2020(1): 48-51(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JSYZ202001014.htm [13] 聂良益. 多环平面连杆机构与球面六杆机构的可动性研究[D]. 武汉: 湖北工业大学, 2016: 7-13.NIE L Y. Mobility research of the multi-loop planar linkage and spherical six-bar linkage[D]. Wuhan: Hubei University of Technology, 2016: 7-13(in Chinese). [14] 宋杰, 梅瑛, 李瑞琴. 平面3-DOF PRR-RRP型六杆机构的曲柄存在条件[J]. 机械传动, 2013, 37(11): 32-34. https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201311008.htmSONG J, MEI Y, LI R Q. Crank existence condition of planar 3-DOF PRR-RRP type six-bar mechanism[J]. Journal of Mechanical Transmission, 2013, 37(11): 32-34(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-JXCD201311008.htm [15] 于红英, 唐德威. 平面铰链五杆机构的奇异性研究[J]. 哈尔滨工业大学学报, 2007, 39(3): 381-385. https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX200703011.htmYU H Y, TANG D W. Study on the singularity of a planar five-bar mechanism[J]. Journal of Harbin Institute of Technology, 2007, 39(3): 381-385(in Chinese). https://www.cnki.com.cn/Article/CJFDTOTAL-HEBX200703011.htm -

 下载:
下载:






 点击查看大图
点击查看大图
计量
- 文章访问数: 331
- HTML全文浏览量: 103
- PDF下载量: 48
- 被引次数: 0
