| Citation: | CHEN Lin, BI Shusheng, LI Dazhai, et al. Dynamic sorting planning of Cartesian robot based on greedy strategy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(5): 805-815. doi: 10.13700/j.bh.1001-5965.2020.0668(in Chinese)

|
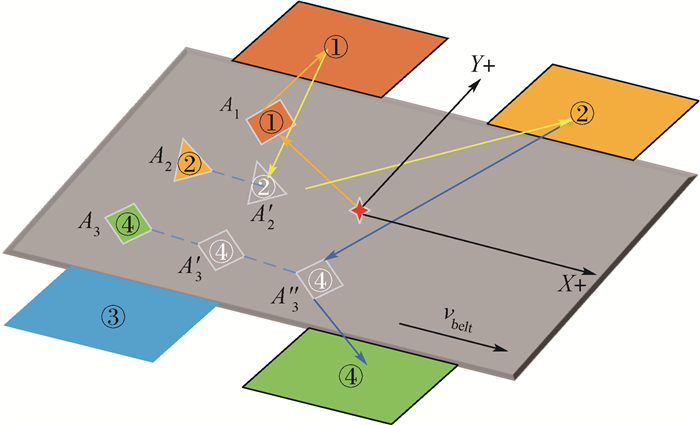
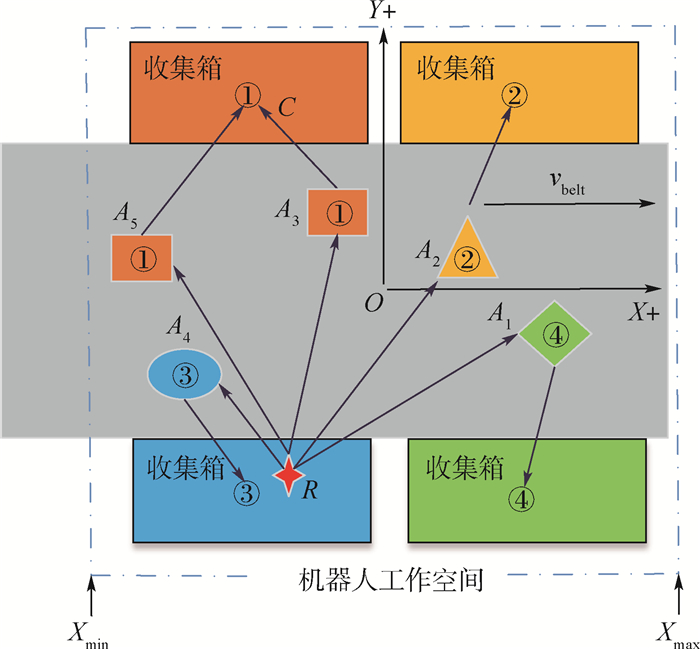
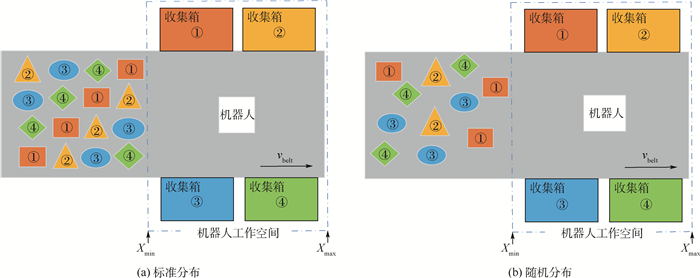
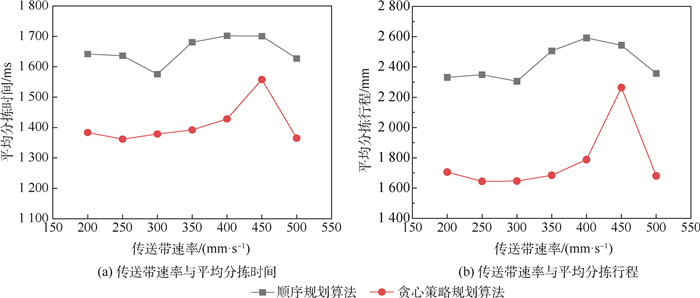
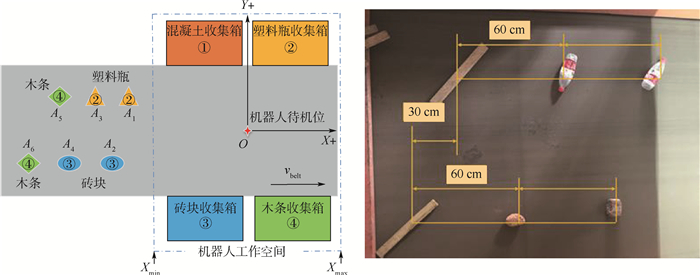
An improved greedy strategy planning algorithm for continuous robot sorting is proposed for the problem that the efficiency is low when traditional sequential sorting algorithm is applied to sort dynamically materials with Cartesian robot. Kinematic model of the Cartesian robot was established to ensure that materials can be accurately picked up. Time window was designed to divide the continuous flow materials on the conveyor belt into regions one by one, and the greedy strategy was applied to plan the sorting sequence of materials in the same time window. Cost function was designed to improve the greedy strategy considering the risk of missing materials in the sorting, which enhances the practicality of the algorithm. Simulation environment was designed to simulate the algorithm, and the sorting experiment was carried out using the designed robot platform to verify the feasibility and effectiveness of the algorithm. Experiments show that the algorithm can plan an effective sorting path in the actual sorting operation of the robot. The average sorting distance and sorting time are both smaller than the sequence planning algorithm, which improves the efficiency of robot sorting for continuous moving materials in the plane. The algorithm, with good real-time performance and strong practicability, has certain guiding significance for the research on the optimization of the sorting path in the case of dynamic sorting with Cartesian robot.
| [1] |
王田苗, 陶永. 我国工业机器人技术现状与产业化发展战略[J]. 机械工程学报, 2014, 50(9): 1-13.
WANG T M, TAO Y. Research status and industrialization development strategy of Chinese industrial robot[J]. Journal of Mechanical Engineering, 2014, 50(9): 1-13(in Chinese).
|
| [2] |
赵京, 张自强, 郑强, 等. 机器人安全性研究现状及发展趋势[J]. 北京航空航天大学学报, 2018, 44(7): 1347-1358. doi: 10.13700/j.bh.1001-5965.2017.0568
ZHAO J, ZHANG Z Q, ZHENG Q, et al. Research status and development trend of robot safety[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(7): 1347-1358. doi: 10.13700/j.bh.1001-5965.2017.0568
|
| [3] |
SKINDEROWICZ R. An improved ant colony system for the sequential ordering problem[J]. Computers & Operations Research, 2017, 86: 1-17.
|
| [4] |
DAHAN F, HINDI E, MATHKOUR A, et al. Dynamic flying ant colony optimization (DFACO) for solving the traveling salesman problem[J]. Sensors, 2019, 19(8): 1-28. doi: 10.1109/JSEN.2019.2897393
|
| [5] |
HUANG R H, YU T H. An effective ant colony optimization algorithm for multi-objective job-shop scheduling with equal-size lot-splitting[J]. Applied Soft Computing, 2017, 57: 642-65. doi: 10.1016/j.asoc.2017.04.062
|
| [6] |
BAYKASOGLU A, SENOL M E. Weighted superposition attraction algorithm for combinatorial optimization[J]. Expert Systems with Applications, 2019, 138: 1-15.
|
| [7] |
PAUL B, NIELS A, MARIE S. Dynamic programming approaches for the traveling salesman problem with drone[J]. Networks, 2018, 72(4): 528-542. doi: 10.1002/net.21864
|
| [8] |
WANG L, CAI R, LIN M, et al. Enhanced list-based simulated annealing algorithm for large-scale traveling salesman problem[J]. IEEE Access, 2019, 7: 144366-144380. doi: 10.1109/ACCESS.2019.2945570
|
| [9] |
QIAO J, HU Z, LI W. Hysteretic noisy frequency conversion sinusoidal chaotic neural network for traveling salesman problem[J]. Neural Computing and Applications, 2019, 31(11): 7055-7069. doi: 10.1007/s00521-018-3535-9
|
| [10] |
LIU C F, ZHANG Y X. Research on MTSP problem based on simulated annealing[C]//International Conference on Information Science and System. New York: ACM, 2018: 283-285.
|
| [11] |
GAO W. New ant colony optimization algorithm for the traveling salesman problem[J]. International Journal of Computational Intelligence Systems, 2020, 13(1): 44-45. doi: 10.2991/ijcis.d.200117.001
|
| [12] |
魏彤, 龙琛. 基于改进遗传算法的移动机器人路径规划[J]. 北京航空航天大学学报, 2020, 46(4): 703-711. doi: 10.13700/j.bh.1001-5965.2019.0298
WEI T, LONG C. Path planning for mobile robot based on improved genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2020, 46(4): 703-711(in Chinese). doi: 10.13700/j.bh.1001-5965.2019.0298
|
| [13] |
贺磊盈, 杨太玮, 武传宇, 等. 基于贪心遗传算法的穴盘苗补栽路径优化[J]. 农业机械学报, 2017, 48(5): 36-43.
HE L Y, YANG T W, WU C Y, et al. Optimization of replugging tour planning based on greedy genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(5): 36-43(in Chinese).
|
| [14] |
BOUDJEDIR C E, BOURI M, BOUKHETALA D. Iterative learning control for trajectory tracking of a parallel Delta robot[J]. Automatisierungstechnik, 2019, 67(2): 145-156. doi: 10.1515/auto-2018-0086
|
| [15] |
LIU C, CAO G H, QU Y Y, et al. An improved PSO algorithm for time-optimal trajectory planning of Delta robot in intelligent packaging[J]. International Journal of Advanced Manufacturing Technology, 2020, 107(3-4): 1091-1099. doi: 10.1007/s00170-019-04421-7
|
| [16] |
LIANG X, SU T. Quintic Pythagorean-Hodograph curves based trajectory planning for Delta robot with a prescribed geometrical constraint[J]. Applied Sciences, 2019, 9(21): 1-14.
|
| [17] |
KANSAL S, MUKHERJEE S. Automatic single-view monocular camera calibration-based object manipulation using novel dexterous multi-fingered Delta robot[J]. Neural Computing and Applications, 2019, 31(7): 2661-2678. doi: 10.1007/s00521-017-3221-3
|
| [18] |
LIU Y N, HU T L, NI H P, et al. Design of a PC-based open industrial robot control system integrated with real-time machine vision[C]//Symposium on Advanced Robotics and Automation. Piscataway: IEEE Press, 2018: 1-6.
|
| [19] |
CORONADO E, MAYA M, CARDENAS A, et al. Vision-based control of a Delta parallel robot via linear camera-space manipulation[J]. Journal of Intelligent & Robotic System, 2017, 85(1): 93-106.
|
| [20] |
ZHANG H, SU T, WU S, et al. Simultaneous path planning and trajectory optimization for high-speed sorting system[J]. International Journal of Advanced Robotic Systems, 2018, 15(5): 1-13.
|
| [21] |
DENAVIT J, HARTENBERG R S. A kinematic notation for low-pair mechanisms based on matrices[J]. Journal of Applied Mechanics, 1955, 22(2): 215-221. doi: 10.1115/1.4011045
|
| [1] | CHEN Q,AN C,XIE C C,et al. Large deformation prediction and geometric nonlinear aeroelastic analysis based on machine learning algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):943-952 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0111. |
| [2] | HAI Chao, TIAN Xin, ZHANG Hong, TAN Da-long, HE Yi-xin, MENG Fan-yong, YANG Min. A Deep Learning-Based Dual-Domain Information Method for CT Metal Artifact Reduction[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0753 |
| [3] | MA Qing-lu, DING Xue-qin, HUANG Xiao-xiao, ZOU Zheng. 3D point cloud segmentation method of road scene based on adaptive graph convolution[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0686 |
| [4] | HE Chi-yuan, CHENG Shao-xu, XU Lin-feng, MENG Fan-man, WU Qing-bo. A Continual Learning Method Based on Differential Feature Distillation for Multimodal Network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0369 |
| [5] | YAO Yougui, LI Shujie, CHEN Zhangyi, XUE Feng. Autism spectrum disorder detection based on multi-modal graph learning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0467 |
| [6] | WANG Dong, CUI Tianshu, JI Libin, HUANG Yonghui, ZHU Yan. Automatic modulation classification based on transfer learning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0231 |
| [7] | HOU Z Q,MA J Y,HAN R X,et al. A fast long-term visual tracking algorithm based on deep learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2391-2403 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0645. |
| [8] | YANG Huixin, WANG Xu, LI Xiang. A prediction method for solid divert and attitude control system performance based on deep neural network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0182 |
| [9] | LIU Y H,HUANG Y,TAN H,et al. On-line prediction method of wing flexible baseline based on autoregressive model[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3426-3433 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0865. |
| [10] | XIA J W,LIU Z K,ZHU X F,et al. A coordinated rendezvous method for unmanned surface vehicle swarms based on multi-agent reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3365-3376 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0088. |
| [11] | BAI Jing-bo, CHEN Yu, XIE Shi-yu, DAI Xin-wei. Design Method for Modulation Strategy of a Single-Inductor Multi-Port Converter Based on Reinforcement Learning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0302 |
| [12] | LIU Ren-di, JIANG Ju, ZHANG Zhe, LIU Xiang. Direct lift control technology of carrier aircraft landing based on reinforcement learning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0403 |
| [13] | WANG Xiangzhang, WANG He, XU Bohao. Hard landing risk prediction of civil aircraft based on GBDT-GS method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0443 |
| [14] | SUN X T,CHENG W,CHEN W J,et al. A visual detection and grasping method based on deep learning[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(10):2635-2644 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0130. |
| [15] | GAO H T,CHEN Y X. A machine learning based method for lithium-ion battery state of health classification and prediction[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3467-3475 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0154. |
| [16] | ZHU Jiazheng, WANG Cong, LI Xinkai, DONG Yingchao, ZHANG Hongli. A deep reinforcement learning based discrete state transition algorithm for fuzzy flexible job shop scheduling[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0211 |
| [17] | CHEN H,BAI J,YIN C T,et al. Behavior based MOOC user dropout predication framework[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(1):74-82 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0188. |
| [18] | YANG Shang-hang, XU Guo-ning, JIA Zhong-zhen, LI Yong-xiang, ZHUANG Chun-yu, YANG Yan-chu. Research on wireless charging coil location method of aircraft based on machine learning[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023-0006 |
| [19] | JIANG Hao, LIU Jixin, DONG Xinfang. Dynamic collaborative sequencing for departure flights based on traffic state[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 2048-2060. doi: 10.13700/j.bh.1001-5965.2021.0066 |
| [20] | YIN Zengyuan, CAI Yuanwen, REN Yuan, WANG Weijie, CHEN Xiaocen, YU Chunmiao. Decoupled active disturbance rejection control method for magnetically suspended rotor based on state feedback[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1210-1221. doi: 10.13700/j.bh.1001-5965.2021.0021 |
| 1. | 李海君,王文双,赵建忠. 基于FA-RBF神经网络的导弹导引系统状态预测. 弹箭与制导学报. 2023(01): 1-7 .  | |
| 2. | 戴金玲,许爱强,申江江,王树友. 基于OCKELM与增量学习的在线故障检测方法. 航空学报. 2022(03): 378-389 . | |
| 3. | 李海君,宋超,赵建忠. 基于CA-RBF神经网络的导弹健康状态预测. 航空兵器. 2022(05): 107-113 . | |
| 4. | 戴金玲,吴明辉,刘星,李睿峰. 核极限学习机的在线状态预测方法综述. 兵器装备工程学报. 2021(06): 12-19 . | |
| 5. | 戴金玲,许爱强,于超,吴阳勇. 基于多元KELM的发动机状态在线预测模型. 北京航空航天大学学报. 2021(11): 2277-2286 .  本站查看 本站查看 | |
| 6. | 刘星,熊厚情,赵建印,朱敏. 基于改进稀疏KELM的在线非平稳动态系统状态预测方法. 系统工程与电子技术. 2020(09): 2022-2032 . | |
| 7. | 朱良,谭继文,张义清. 断丝状态下的钢丝绳故障诊断. 煤矿机械. 2019(09): 160-163 . | |
| 8. | 孙永泽,陆忠华. 基于超限学习机与随机响应面方法的深度学习超参数优化算法. 高技术通讯. 2019(12): 1165-1174 . |


Figures(12) / Tables(6)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Zhang Jun, Li Zhongxiao. Delay analysis of self-organized TDMA VHF datalink[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(03): 222-226. (in Chinese)





 DownLoad:
DownLoad: