



Distributed coordinated navigation filtering algorithm for cooperative target by multi-satellite
-
摘要:
针对多颗在轨卫星对空间合作目标的协同导航问题,提出了一种适用于协同导航的分布式球面单形-径向容积求积分卡尔曼滤波(DSSRCQKF)算法。为了计算非线性滤波中的高斯加权积分,分别使用球面单形准则和二阶高斯-拉盖尔求积分准则计算球面积分和径向积分,提出了一种新的球面单形-径向容积求积分准则。将该准则嵌入分布式卡尔曼滤波框架中,结合协同导航的非线性数学模型,给出适用于协同导航的DSSRCQKF算法,该算法要求每颗导航星仅与其邻居星进行通信,通过数据的分布式融合实现对目标星轨道状态的一致估计,从而避免了传统集中式处理中较高的通信和计算压力。仿真实验结果表明,与分布式卡尔曼滤波相比,本文算法将对合作目标的实时定位精度提高了11 m,定速精度提高了0.02 m/s,从而验证了本文算法的有效性。
Abstract:A distributed spherical simplex-radial cubature quadrature Kalman filter (DSSRCQKF) was proposed aiming at the coordinated navigation problem for cooperative target by multi-satellite on orbit. The spherical simplex rule and second-order Gauss-Laguerre quadrature rule were adopted to calculate the spherical integral and radial integral, respectively, in order to calculate the Gaussian weighted integral in nonlinear Kalman filter, and a novel spherical simplex-radial cubature quadrature rule was put forward. Combined with the nonlinear cooperative navigation mathematical model, the above rule is embedded into the distributed Kalman filter framework to achieve the DSSRCQKF, in which the satellite only needs to communicate with its neighbors. The consensus estimation of the orbital state of the target satellite is achieved using the distributed data fusion method, thus avoiding the higher communication and computational burden in centralized filter. The simulation results show that, compared with the distributed extended Kalman filter, DSSRCQKF improves the real-time positioning accuracy by 11 m and the velocity accuracy by 0.02 m/s, which verifies the validity of the proposed algorithm.
-

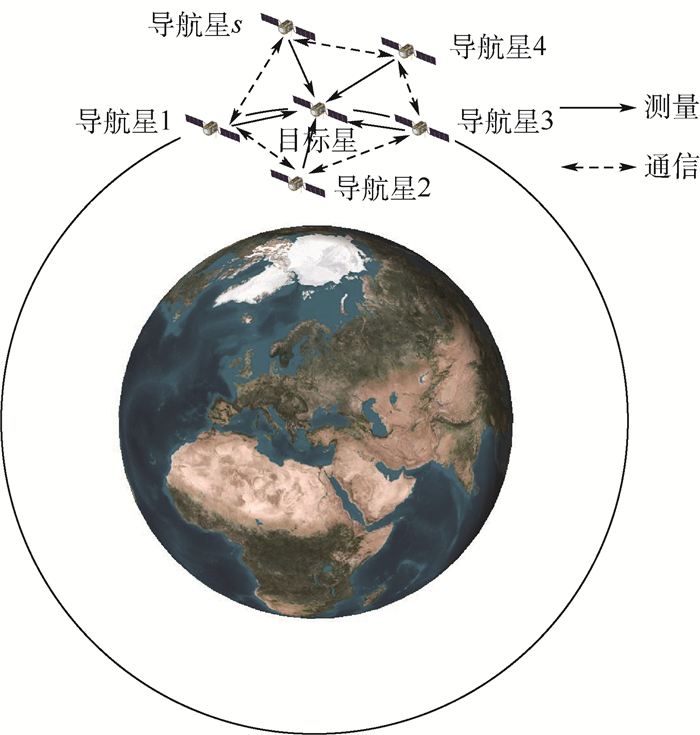
图 3 4颗导航星间的通信拓扑结构
Figure 3. Communication topology structure among four navigation satellites

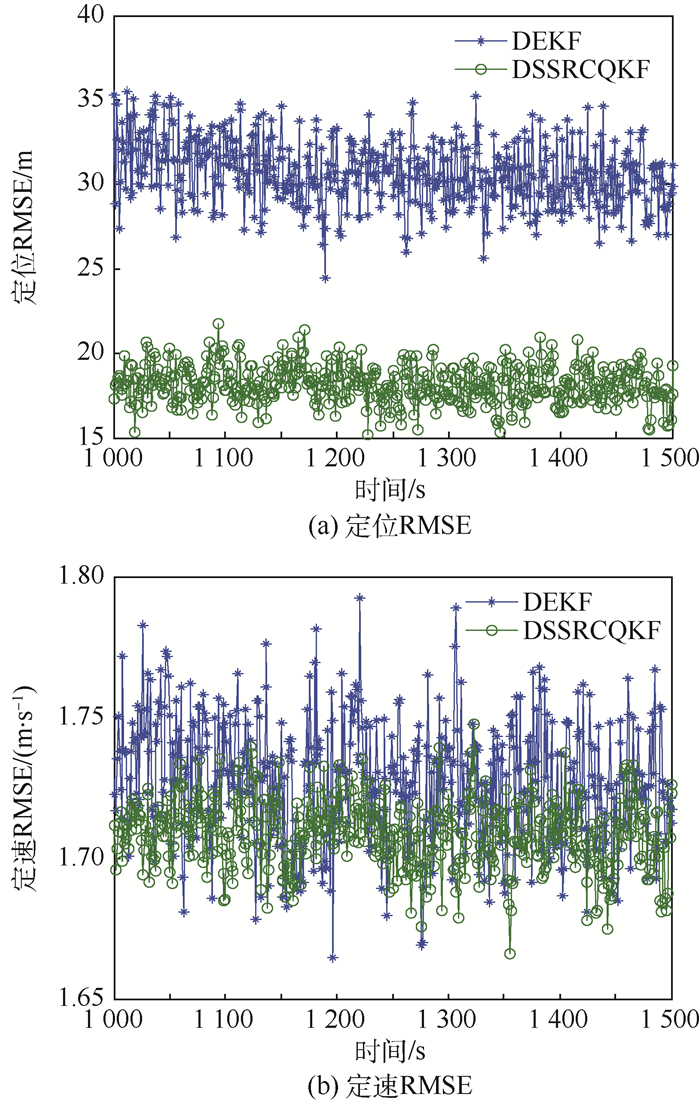
图 4 导航星1对目标星的实时定轨RMSE
Figure 4. Real-time orbit determination RMSE of navigation Satellite 1 to target satellite

图 5 导航星2对目标星的实时定轨RMSE
Figure 5. Real-time orbit determination RMSE of navigation Satellite 2 to target satellite

图 6 导航星3对目标星的实时定轨RMSE
Figure 6. Real-time orbit determination RMSE of navigation Satellite 3 to target satellite

图 7 导航星4对目标星的实时定轨RMSE
Figure 7. Real-time orbit determination RMSE of navigation Satellite 4 to target satellite
表 1 卫星轨道六根数
Table 1. Six orbital elements of satellites
卫星 半长轴/km 偏心率 轨道倾角/(°) 升交点赤经/(°) 近地点幅角/(°) 真近点角/(°) 目标星 16378.1 0 27 35 30 10 导航星1 15378.1 0 45 60 0 0 导航星2 15378.1 0 10 60 15 20 导航星3 15378.1 0 38 60 20 0 导航星4 15378.1 0 70 60 30 0  下载: 导出CSV
下载: 导出CSV
表 2 协同导航平均定位RMSE
Table 2. Mean position RMSE of coordinated navigation
导航星 平均定位RMSE/m DEKF DSSRCQKF 导航星1 30.775 18.633 导航星2 30.679 18.166 导航星3 31.456 18.969 导航星4 30.393 18.189
下载: 导出CSV
表 3 协同导航平均定速RMSE
Table 3. Mean velocity RMSE of coordinated navigation
导航星 平均定速RMSE/(m·s-1) DEKF DSSRCQKF 导航星1 1.726 1.708 导航星2 1.727 1.709 导航星3 1.727 1.709 导航星4 1.725 1.706
下载: 导出CSV
-
[1] 王晓初, 尤政, 赵开春, 等.分布式卫星系统的协同导航估计方法[J].宇航学报, 2013, 34(8):1107-1113. http://d.old.wanfangdata.com.cn/Periodical/yhxb201308011WANG X C, YOU Z, ZHAO K C, et al.A cooperative navigation estimation method in distributed satellite system[J]. Journal of Astronautics, 2013, 34(8):1107-1113(in Chinese). http://d.old.wanfangdata.com.cn/Periodical/yhxb201308011 [2] 张艾, 李勇.基于星间测距的编队卫星一致性导航算法[J].空间控制技术与应用, 2015, 41(3):24-27. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjkzjsyyy201503005ZHANG A, LI Y.A consensus navigation algorithm for spacecraft formation based on distance ranging[J]. Aerospace Control and Application, 2015, 41(3):24-27(in Chinese). http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kjkzjsyyy201503005 [3] ZHOU Z W, FANG H T, HONG Y G.Distributed estimation for moving target based on state-consensus strategy[J]. IEEE Transactions on Automatic Control, 2013, 58(8):2097-2100. http://cn.bing.com/academic/profile?id=47a82aaa3e2ff7051ae213e644bbfb8e&encoded=0&v=paper_preview&mkt=zh-cn [4] OLFATI-SABER R. Distributed Kalman filtering for sensor networks[C]//Proceedings of the 46th IEEE Conference on Decision and Control. Piscataway, NJ: IEEE Press, 2007: 5492-5496. [5] BATTISTELLI G, CHISCI L. Stability of consensus extended Kalman filtering for distributed state estimation[C]//Preprints of the 19th World Congress the International Federation of Automatic Control. Amsterdam: Elsevier, 2014: 5520-5525. [6] JULIER S J, UHLMANN J K, DURRANTWHYTE H F.A new method for nonlinear transformation of means and covariances in filters and estimators[J]. IEEE Transactions on Automatic Control, 2000, 45(3):477-482. doi: 10.1109/9.847726 [7] ARASARATNAM I, HAYKIN S.Cubature Kalman filters[J]. IEEE Transactions on Automatic Control, 2009, 54(6):1254-1269. doi: 10.1109/TAC.2009.2019800 [8] ZAREI J, SHOKRI E.Convergence analysis of non-linear filtering based on cubature Kalman filter[J]. IET Science, Mea-surement & Technology, 2015, 9(3):294-305. http://ieeexplore.ieee.org/xpl/articleDetails.jsp?reload=true&arnumber=7089401&filter%3DAND%28p_IS_Number%3A7089353%29 [9] 钱华明, 黄蔚, 葛磊, 等.基于四元数平方根容积卡尔曼滤波的姿态估计[J].北京航空航天大学学报, 2013, 39(5):646-649. http://bhxb.buaa.edu.cn/CN/abstract/abstract12619.shtmlQIAN H M, HUANG W, GE L, et al.Attitude estimation based on quaternion square-root cubature Kalman filter[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(5):646-649(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract12619.shtml [10] 方君, 戴邵武, 许文明, 等.基于ST-SRCKF的超高速强机动目标跟踪算法[J].北京航空航天大学学报, 2016, 42(8):1698-1708. http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtmlFANG J, DAI S W, XU W M, et al.Highly maneuvering hypervelocity-target tracking algorithm based on ST-SRCKF[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8):1698-1708(in Chinese). http://bhxb.buaa.edu.cn/CN/abstract/abstract13609.shtml [11] WANG S Y, FENG J C, CHI K T.Spherical simplex-radial cubature Kalman filter[J]. IEEE Signal Processing Letters, 2014, 21(1):43-46. http://cn.bing.com/academic/profile?id=da7f96dcec3678f7b28f1812840f3242&encoded=0&v=paper_preview&mkt=zh-cn [12] SHOVAN B, SWATI.Cubature quadrature Kalman filter[J]. IET Signal Processing, 2013, 7(7):533-541. http://cn.bing.com/academic/profile?id=6ae07cd38ccacfd568af7fd05cc8f741&encoded=0&v=paper_preview&mkt=zh-cn [13] BATTISTELLI G, CHISCI L, MUGNAI G, et al.Consensus-based linear and nonlinear filtering[J]. IEEE Transactions on Automatic Control, 2015, 60(5):1410-1415. http://cn.bing.com/academic/profile?id=2c8f0c7c073d2b8d9449459a83d41568&encoded=0&v=paper_preview&mkt=zh-cn [14] 李璟璟, 张迎春, 郑靖, 等.基于信息融合的大椭圆轨道卫星组合导航方法[J].宇航学报, 2012, 33(9):1234-1239. http://d.wanfangdata.com.cn/Periodical_yhxb201209007.aspxLI J J, ZHANG Y C, ZHENG J, et al.An information fusion based integrated navigation method for highly elliptical orbit satellite[J]. Journal of Astronautics, 2012, 33(9):1234-1239(in Chinese). http://d.wanfangdata.com.cn/Periodical_yhxb201209007.aspx [15] 朱奇光, 袁梅, 王梓巍, 等.机器人球面单径容积FastSLAM算法[J].机器人, 2015, 37(6):709-716. https://www.wenkuxiazai.com/doc/b0e434ce2f60ddccdb38a0a7.htmlZHU Q G, YUAN M, WANG Z W, et al.A robot spherical simplex-radial cubature FastSLAM algorithm[J]. Robot, 2015, 37(6):709-716(in Chinese). https://www.wenkuxiazai.com/doc/b0e434ce2f60ddccdb38a0a7.html -

 下载:
下载:





 点击查看大图
点击查看大图
计量
- 文章访问数: 904
- HTML全文浏览量: 111
- PDF下载量: 336
- 被引次数: 0
