| Citation: | WANG Anqi, WEI Yanhui, HAN Han, et al. Trajectory planning method for redundant manipulator based on configuration plane[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(9): 1991-1997. doi: 10.13700/j.bh.1001-5965.2017.0746(in Chinese)

|
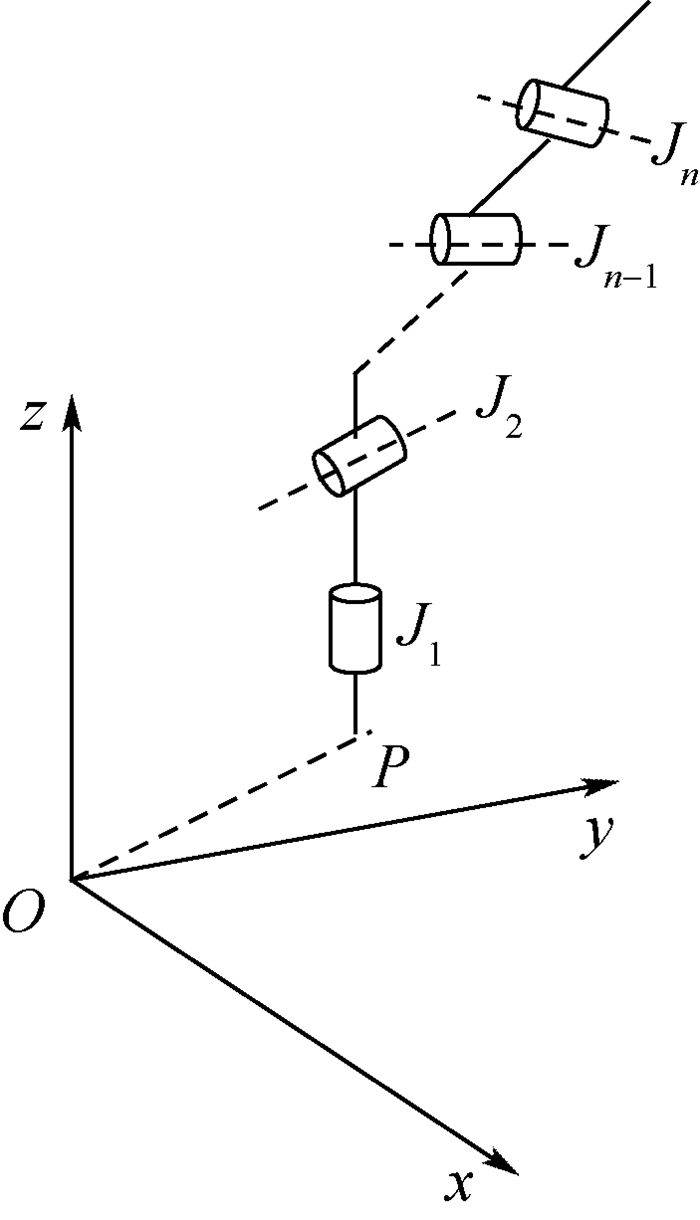
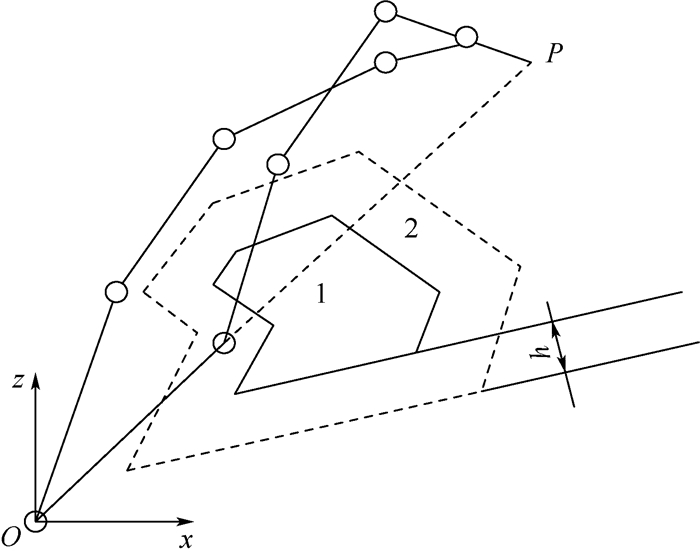
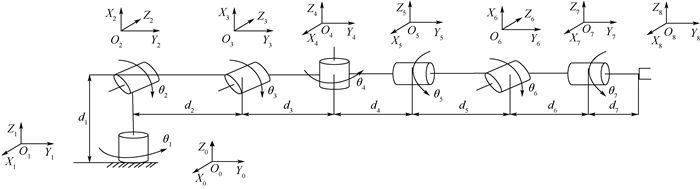
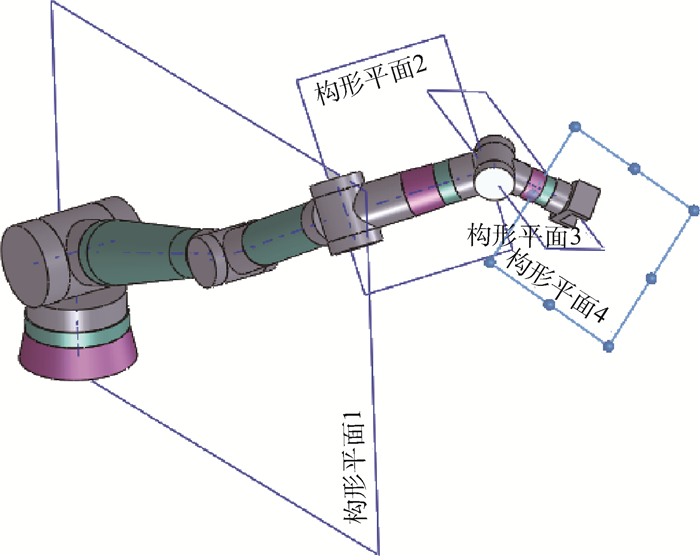
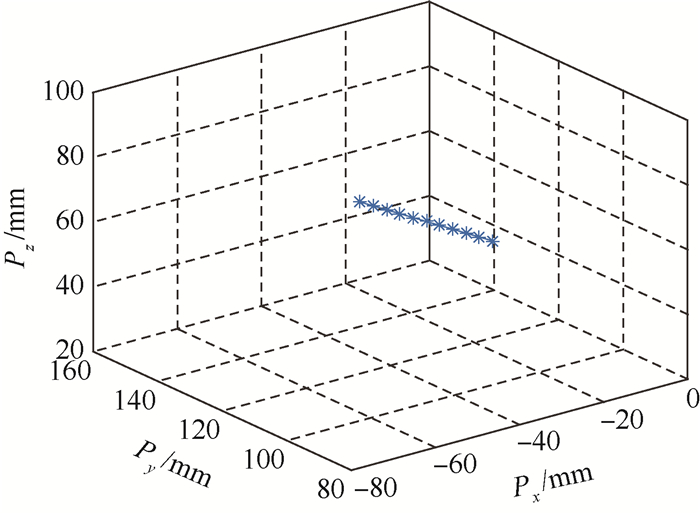
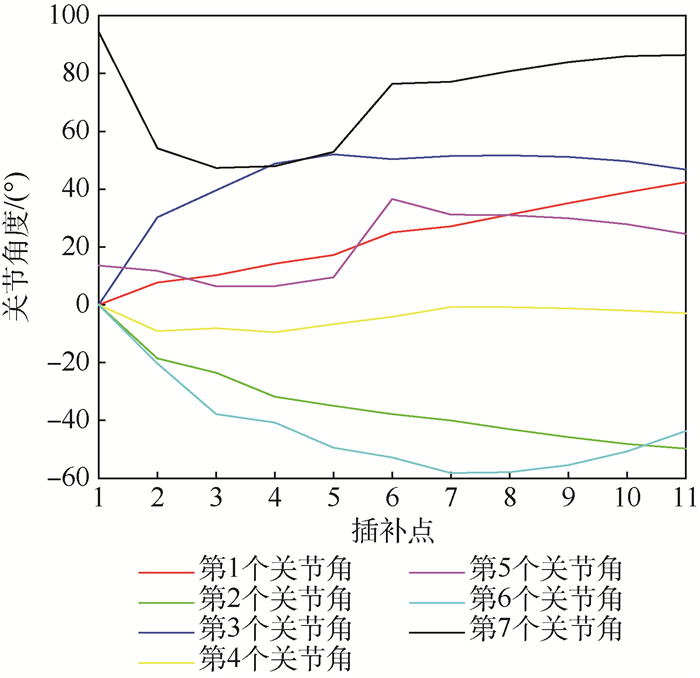
This paper proposes a novel method for solving the problem of multi-goal redundant manipulator trajectory planning. Specifically, Specifically, the trajectory planning path for a redundant manipulator is a complicated process with the joint constraint and the limit of spatial obstacle. First, to ensure stability of the manipulator motion, the work configuration of a redundant manipulator can be composed of multiple joint axes, which are connected in sequence. Second, by using the spatial geometry method, spatial trajectory planning for a redundant manipulator can be performed based on the configuration plane. Third, the optimized spatial path can be quickly obtained, which achieves multi-goal trajectory planning using the method of spatial vector leading, obstacle avoidance path comparing and choosing. Finally, a simulation using a 7-DOF redundant manipulator is conducted. The simulation result shows that the path planning problem can be solved quickly and intuitively by this method. Further, it does not depend on the work configuration of the manipulator and can be applied to redundant manipulators with more degrees of freedom.
| [1] |
LOZANO-PEREZ T.Automatic planning of manipulator transfer movements[J].IEEE Transaction on Systems Man and Cybermetics, 1980, 11(10):681-698.
|
| [2] |
LOZANO-PEREZ T.Spatial planning:A configuration space approach[J].IEEE Transactions on Computers, 2006, 32(2):108-120.
|
| [3] |
LAVALLE S.Rapidly-exploring random trees: Progress and prospects[C]//Procceedings of the 2000 Fourth International Workshop on Algorithmic Foundations on Robotics.Piscataway, NJ: IEEE Press, 2000: 1-19.
|
| [4] |
BERTRAM D, KUFFNER J, DILLMANN R, et al.An integrated approach to inverse kinematics and path planning for redundant manipulators[C]//Proceedings of the 2006 IEEE International Conference on Robotics and Automation.Piscataway, NJ: IEEE Press, 2006: 1874-1879.
|
| [5] |
STILMAN M.Global manipulation planning in robot joint space with task constraints[J].IEEE Transactions on Robotics, 2010, 26(3):576-584. doi: 10.1109/TRO.2010.2044949
|
| [6] |
陈撼, 裴甲瑞, 陆智俊, 等.空间冗余机械臂的路径规划算法研究[J].上海航天, 2017, 34(5):30-39.
CHEN H, PEI J R, LU Z J, et al.Research on path planning algorithm for spatially redundant manipulator[J].Shanghai Aerospace, 2017, 34(5):30-39(in Chinese).
|
| [7] |
高涵, 张明路, 张小俊.冗余机械臂空间轨迹规划综述[J].机械传动, 2016, 40(10):176-180.
GAO H, ZHANG M L, ZHANG X J.A survey of space trajectory planning for redundant manipulators[J].Mechanical Transmission, 2016, 40(10):176-180(in Chinese).
|
| [8] |
HADDAD M, KHALIL W, LEHTIHET H E.Trajectory planning of unicycle mobile robots with a trapezoidal-velocity constraint[J].IEEE Transactions on Robotics, 2010, 26(5):954-962. doi: 10.1109/TRO.2010.2062090
|
| [9] |
SHIMIZU M, KAKUYA H, YOON W K, et al.Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and Its application to redundancy Resolution[J].IEEE Transactions on Robotics, 2008, 24(5):1131-1142. doi: 10.1109/TRO.2008.2003266
|
| [10] |
TIAN Y, CHEN X, HUANG Q, et al.Kinematic analysis and solution of the natural posture of a 7-DOF humanoid manipulator[C]//Proceedings of the 2010 IEEE International Conference on Automation and Logistics.Piscataway, NJ: IEEE Press, 2010: 156-162.
|
| [11] |
TRAN M T, SOUERES P, TAIX M, et al.Humanoid human-like reaching control based on movement primitives[C]//Proceedings of the 201019th IEEE International Symposium on Robot and Human Interactive Communication. Piscataway, NJ: IEEE Press, 2010: 546-551.
|
| [12] |
MARTIN D P, BAILLIEUL J, HOLLERBACH J M.Resolution of kinematic redundancy using optimization techniques[J].IEEE Transactions on Robotics and Automation, 1989, 5(4):529-533. doi: 10.1109/70.88067
|
| [13] |
贠超, 刘刚, 王刚, 等.基于RBF神经网络和二次规划的冗余机械臂避障问题研究[J].机电工程, 2016, 33(1):1-7. doi: 10.3969/j.issn.1009-9492.2016.01.001
YUN C, LIU G, WANG G, et al.Research on obstacle avoidance of redundant manipulator based on RBF neural network and quadratic programming[J].Electrical and Mechanical Engineering, 2016, 33(1):1-7(in Chinese) doi: 10.3969/j.issn.1009-9492.2016.01.001
|
| [14] |
王俊龙, 张国良, 羊帆, 等.改进人工势场法的机械臂避障路径规划[J].计算机工程与应用, 2013, 49(21):266-270. doi: 10.3778/j.issn.1002-8331.1201-0360
WANG J L, ZHANG G L, YANG F, et al.Improved artificial potential field method for manipulator obstacle avoidance path planning[J].Computer Engineering and Applications, 2013, 49(21):266-270(in Chinese). doi: 10.3778/j.issn.1002-8331.1201-0360
|
| [15] |
汪首坤, 朱磊, 王军政.基于导航势函数法的六自由度机械臂避障路径规划[J].北京理工大学学报, 2015, 35(2):186-191.
WANG S K, ZHU L, WANG J Z.Obstacle avoidance path planning based on navigation potential function method for six degrees of freedom manipulator[J].Journal of Beijing Institute of Technology, 2015, 35(2):186-191(in Chinese).
|
| [1] | WU Shanqiang, CHEN Qi, SUN Yajun, NI Zao, CHEN Wen. Transonic Aeroservoelastic Analysis of Civil Aircraft Based on Over Field-Panel Method[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0729 |
| [2] | ZHANG Y Z,LI Y. Research on abstractive text summarization based on triplet information guidance[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(12):3677-3685 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0896. |
| [3] | HUANG S Y,HU H Y,YANG Y,et al. Image super-resolution reconstruction network based on expectation maximization self-attention residual[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):388-397 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0401. |
| [4] | GONG K C,ZHOU M L,TANG D M. Region-aware real-time portrait super resolution reconstruction network[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(2):588-595 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0394. |
| [5] | ZHANG Yan, SUN Ming-lei, LIU Zi-yang, SUN Ye-mei, LIU Shu-dong. Infrared image super-resolution based on visible image guidance and recursive fusion[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023-0590 |
| [6] | WU Z Y,GAO Z X,CHEN X M,et al. Mach number effect in shock-wave/turbulent-boundary-layer interaction flow[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(11):3484-3494 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0857. |
| [7] | LI W T,HE Y Q,ZHANG Y Y,et al. Complex burn-back analysis and internal ballistic performance prediction of non-uniform grain[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(8):2524-2537 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0669. |
| [8] | YANG Gong-peng, ZHOU Zheng-gan, MA Teng-fei, WANG Jun, LI Yang, ZHOU Wen-bin. Research on finite element simulation modeling for ultrasonic testing of coarse-grained materials[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0676 |
| [9] | CHEN Shi, XU He-ming, SUN Kai, XU Yi-han, ZHANG Yi-shang. Prediction of creep strain of turbine blades based on finite element nodes[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0639 |
| [10] | SUN Y Q,QIANG H R,DONG K H,et al. Derivation and application of iterative scheme for angle-only orbit determination[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(12):3245-3252 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0062. |
| [11] | SUN Xiao-kun, CHEN Yang, HU Can-bin, XIANG De-liang. SAR target recognition method under limited measured sample conditions[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0648 |
| [12] | CHENG De-qiang, WANG Pei-jie, DONG Yan-qiang, KOU Qi-qi, JIANG He. Image super-resolution reconstruction based on multi-scale spatial attention guidance network[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0547 |
| [13] | ZHAO T M,HOU J X,LIU Y W. Influence mechanism of continuous curvature shaping method on buzz-saw noise[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):922-931 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0342. |
| [14] | HAN X,WANG Y X,CHENG X C,et al. A decentralized multi-sensor fusion estimator using finite memory buffers[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):335-343 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0240. |
| [15] | LU P,ZHAO Z M,GAO T,et al. Thermal control design and verification for high resolution stereo mapping camera system[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(4):768-779 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0854. |
| [16] | YANG Chao, JIANG Yu, WU Zhigang. Numerical simulation of skipping motion of three-dimensional structure based on boundary element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(9): 1678-1691. doi: 10.13700/j.bh.1001-5965.2022.0141 |
| [17] | YANG Lan, AN Chao, XIE Changchuan, YANG Chao. Gust load alleviation analysis based on vortex lattice method in state-space form[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1200-1209. doi: 10.13700/j.bh.1001-5965.2021.0023 |
| [18] | HONG Zheng, YE Zhengyin. Numerical investigation on evolution of T-S wave on a two-dimensional compliant wall with finite length[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1190-1199. doi: 10.13700/j.bh.1001-5965.2021.0030 |
| [19] | XIE Xiangying, LAI Guangzhi, NA Zhixiong, LUO Xin, WANG Dong. Occlusion recognition algorithm based on multi-resolution feature auto-selection[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(7): 1154-1163. doi: 10.13700/j.bh.1001-5965.2021.0289 |
| [20] | GONG Xiaoquan, WU Xiaojun, TANG Jing, LI Ming, ZHANG Jian. Application of r-grid adaptive for shock capturing in discontinuous Galerkin finite element method[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1889-1898. doi: 10.13700/j.bh.1001-5965.2021.0046 |


Figures(9) / Tables(1)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Yang Zhongzhou, Lee Chun-Hian. High resolution finite element procedure for compressible flows simulation[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34(02): 171-174. (in Chinese)





 DownLoad:
DownLoad: