| Citation: | XU Yaru, LIU Rong. An approach for dynamic modeling of climbing robot[J]. Journal of Beijing University of Aeronautics and Astronautics, 2018, 44(2): 280-285. doi: 10.13700/j.bh.1001-5965.2017.0097(in Chinese)

|
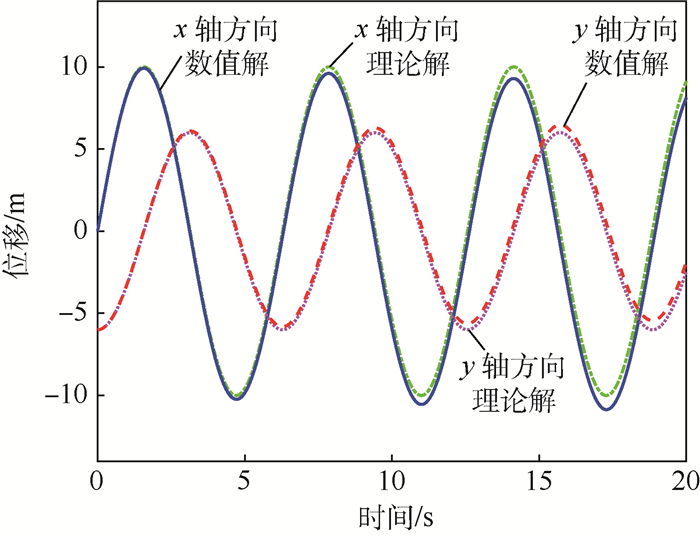
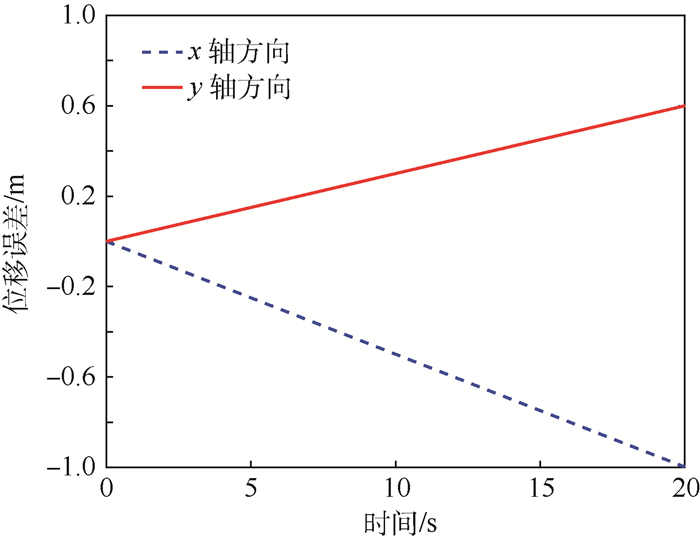
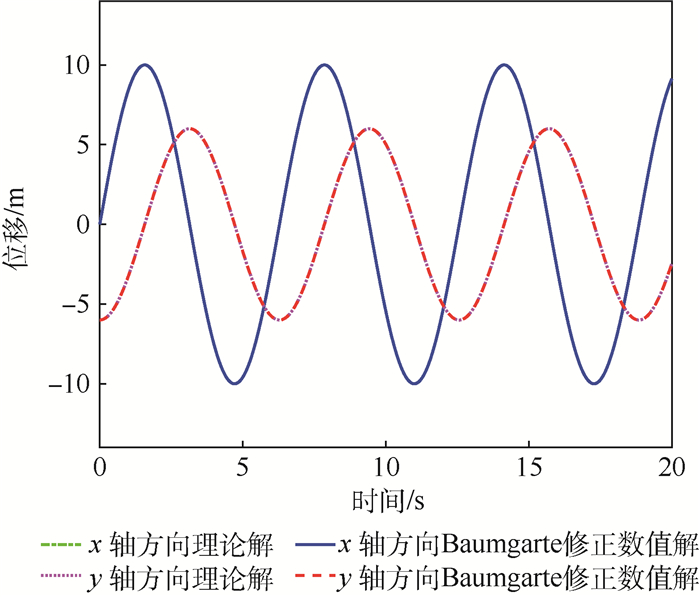
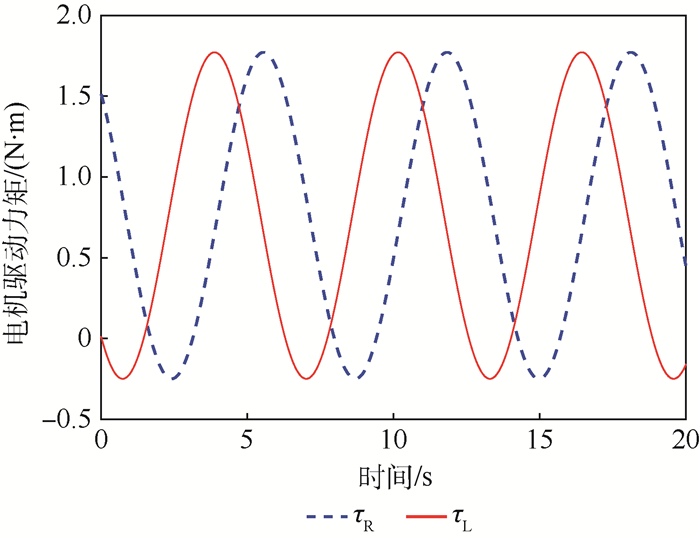
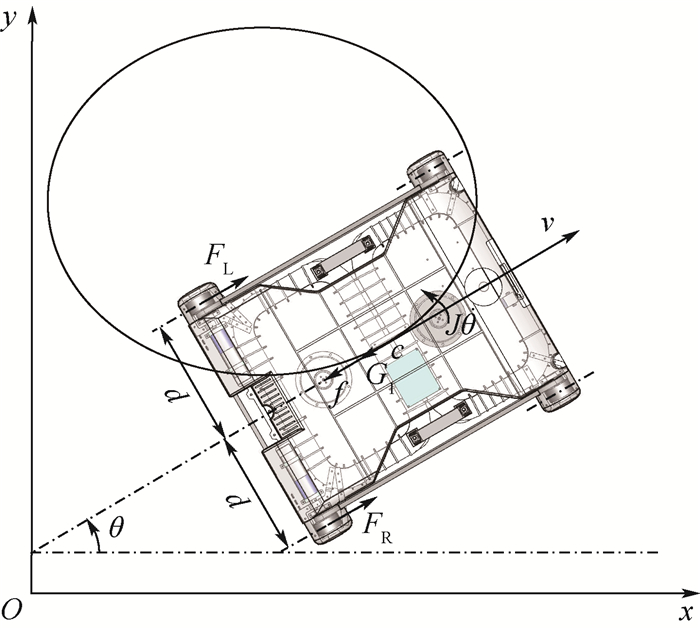
With the aim of dynamic modeling of the climbing robot with dual-cavity structure and wheeled locomotion mechanism, an analytical dynamic model based on the Udwadia-Kalaba equation is established. The desired trajectory, which is regarded as constraints imposed on the system, is integrated into the dynamic modeling process of climbing robot dexterously. The explicit expression of additional torques required to satisfy constraints and explicit dynamic equation of the system without Lagrange multiplier are obtained. However, constraint violation arises when the initial conditions are incompatible with the constraint equations. Baumgarte's constraint violation stabilization method is considered for constraint violation suppression. The simulations of the varying law of the generalized coordinate variables and the trajectories are performed to demonstrate that this modeling method is feasible and effective.
| [1] |
XU F, SHEN J, JIANG G P.Kinematic and dynamic analysis of a cable-climbing robot[J].International Journal of Advanced Robotic Systems, 2015, 12(7):1-17. doi: 10.5772/60865
|
| [2] |
PROVANCHER W R, JENSEN-SEGAL S I, FEHLBERG M A.ROCR:An energy-efficient dynamic wall-climbing robot[J].IEEE/ASME Transactions on Mechatronics, 2011, 16(5):897-906. doi: 10.1109/TMECH.2010.2053379
|
| [3] |
NAM S, OH J, LEE G, et al.Dynamic analysis during internal transition of a compliant multi-body climbing robot with magnetic adhesion[J].Journal of Mechanical Science and Technology, 2014, 28(12):5175-5187. doi: 10.1007/s12206-014-1141-z
|
| [4] |
BRAUN D J, GOLDFARB M.Eliminating constraint drift in the numerical simulation of constrained dynamical systems[J].Computer Methods in Applied Mechanics and Engineering, 2009, 198(37):3151-3160.
|
| [5] |
PAN D, GAO F, MIAO Y.Dynamic research and analyses of a novel exoskeleton walking with humanoid gaits[J].Proceedings of the Institution of Mechanical Engineers, Part C:Journal of Mechanical Engineering Science, 2014, 228(9):1501-1511. doi: 10.1177/0954406213509611
|
| [6] |
KORAYEM M H, SHAFEI A M.A new approach for dynamic modeling of n-viscoelastic-link robotic manipulators mounted on a mobile base[J].Nonlinear Dynamics, 2015, 79(4):2767-2786. doi: 10.1007/s11071-014-1845-8
|
| [7] |
UDWADIA F E, KALABA R E.A new perspective on constrained motion[J].Proceedings:Mathematical and Physical Sciences, 1992, 439(1906):407-410. doi: 10.1098/rspa.1992.0158
|
| [8] |
CHO H, YU A.New approach to satellite formation-keeping:Exact solution to the full nonlinear problem[J].Journal of Aerospace Engineering, 2009, 22(4):445-455. doi: 10.1061/(ASCE)AS.1943-5525.0000013
|
| [9] |
LIU J, LIU R.Dynamic modeling of dual-arm cooperating manipulators based on Udwadia-Kalaba equation[J].Advances in Mechanical Engineering, 2016, 8(7):1-10.
|
| [10] |
HUANG J, CHEN Y H, ZHONG Z.Udwadia-Kalaba approach for parallel manipulator dynamics[J].Journal of Dynamic Systems, Measurement, and Control, 2013, 135(6):1012-1030.
|
| [11] |
PENNESTRI E, VALENTINI P P, DE FALCO D.An application of the Udwadia-Kalaba dynamic formulation to flexible multibody systems[J].Journal of the Franklin Institute, 2010, 347(1):173-194. doi: 10.1016/j.jfranklin.2009.10.014
|
| [12] |
ZHAO H, ZHEN S, CHEN Y H.Dynamic modeling and simulation of multi-body systems using the Udwadia-Kalaba theory[J].Chinese Journal of Mechanical Engineering, 2013, 26(5):839-850. doi: 10.3901/CJME.2013.05.839
|
| [13] |
BAUMGARTE J.Stabilization of constraints and integrals of motion in dynamical systems[J].Computer Methods in Applied Mechanics and Engineering, 1972, 1(1):1-16. doi: 10.1016/0045-7825(72)90018-7
|
| [14] |
SCHUTTE A, UDWADIA F.New approach to the modeling of complex multibody dynamical systems[J].Journal of Applied Mechanics, 2011, 78(2):856-875.
|
| [15] |
UDWADIA F E, KALABA R E.What is the general form of the explicit equations of motion for constrained mechanical systems[J].Journal of Applied Mechanics, 2002, 69(3):335-339. doi: 10.1115/1.1459071
|
| [16] |
CHO H, UDWADIA F E.Explicit solution to the full nonlinear problem for satellite formation-keeping[J].Acta Astronautica, 2010, 67(3):369-387.
|
| [1] | CUI Zhen, ZHAO Zhigang, SU Cheng, MENG Jiadong, ZHAO Xiangtang, CHAI Wei. Dynamics and Dynamic Stability Analysis of Rope Traction Upper Limb Rehabilitation Robot[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0827 |
| [2] | WANG Boqiao, ZHANG Xianghua, CHEN Zheng, ZHANG Ze. Modelling Method for Non-Singular Dynamics of Air-To-Air Missiles and Trajectory Optimization[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0760 |
| [3] | LEI C L,SONG R Z,FAN G F,et al. Time-varying displacement excitation and dynamic modeling of local defects in angular contact ball bearings[J]. Journal of Beijing University of Aeronautics and Astronautics,2025,51(3):753-762 (in Chinese). doi: 10.13700/j.bh.1001-5965.2023.0165. |
| [4] | SUN Minzhe, JI Yi, DONG Fuxiang, SUN Guanghui. Dynamics analysis of spacecraft formation based on exponential integrator[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0535 |
| [5] | DUAN Leqiang, LI Lei, WANG Weijie, ZHU Hongye, PANG Weikun, REN Yuan. Dynamics Modeling and Active disturbance rejection control of Magnetically Suspended Universally Stabilized Platform[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0065 |
| [6] | LI Yijian, ZHOU Jianghua, ZHANG Xiaojun, ZHAO Chunyang, XU Guoning. Dynamic modeling and control analysis of pitch/roll channels in the ball cabin system[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2024.0356 |
| [7] | HUANG Dan, LONG Jian-fei, CHENG Ye, WANG Jia-bin, XU Lu-xiang, YANG Wei. Experimental study on beam characteristics of μHT-1 Thruster under wide range adjustment of operating parameters[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0406 |
| [8] | CHEN P X,WU C C,NI Z Y. Dynamic modelling and simulation of a tethered-net in space[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(9):2951-2962 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0747. |
| [9] | LIU Z Y,ZHANG G,LIU H R,et al. Software robot-based application behavior simulation for cyber security range in industrial control field[J]. Journal of Beijing University of Aeronautics and Astronautics,2024,50(7):2237-2244 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0597. |
| [10] | WANG Z X,WAN Z Q,WANG X Z,et al. Fast stability analysis method for composite panel with variable angle tow fiber[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(2):353-366 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0259. |
| [11] | WANG L Y,WU L,YANG S,et al. Hot spots areas mining of online ride-hailing based on D-OPTICS algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3124-3131 (in Chinese). doi: 10.13700/j.bh.1001-5965.2022.0008. |
| [12] | WANG C Y,YANG L M,LI Y H. A mapping leader formation control strategy for multiple mobile robots based on two-stage sliding mode control[J]. Journal of Beijing University of Aeronautics and Astronautics,2023,49(11):3108-3114 (in Chinese). doi: 10.13700/j.bh.1001-5965.2021.0792. |
| [13] | LEI Lu, WU Ming-yu, GUO Zhi-bo, QIAO Xiao-li. Research on fast sign-off method for wiring harness topological drawings[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0427 |
| [14] | WANG Xiao, MA Jun, XIONG Xin, CHEN Jing-yu. Dynamic modeling and analysis of rolling bearing with raceway spalling defect[J]. Journal of Beijing University of Aeronautics and Astronautics. doi: 10.13700/j.bh.1001-5965.2023.0565 |
| [15] | PENG Cheng, SUN Liguo, WANG Yanyang, TAN Wenqian, XIAO Feng. Control oriented longitudinal modeling and analysis of pigeon-like flapping-wing aircraft[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2510-2519. doi: 10.13700/j.bh.1001-5965.2021.0130 |
| [16] | CHI Shengkai, XIE Yongfang, CHEN Xiaofang, PENG Fan. Obstacle avoidance method of mobile robot based on obstacle cost potential field[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(11): 2289-2303. doi: 10.13700/j.bh.1001-5965.2021.0095 |
| [17] | ZHANG Libo, LI Yupeng, ZHU Deming, FU Yongling. Inverse kinematic solution of nursing robot based on genetic algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1925-1932. doi: 10.13700/j.bh.1001-5965.2021.0042 |
| [18] | XU Haiying, YANG Guang, ZHANG Wei, YANG Bo, SANG Xinghua, WANG Zhuang. Properties of gas discharge electron beam coaxial wire of fuse additive manufacturing and microstructure of TC4 titanium alloy[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(12): 2373-2380. doi: 10.13700/j.bh.1001-5965.2021.0147 |
| [19] | DU Mo, MENG Bao, PAN Feng, WAN Min. Optimal design of printed circuit heat exchanger considering manufacturing constraints[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(10): 1994-2005. doi: 10.13700/j.bh.1001-5965.2021.0045 |
| [20] | ZHOU Lifang, LIU Jinlan, LI Weisheng, LEI Bangjun, HE Yu, WANG Yihan. Object tracking method based on IoU-constrained Siamese network[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48(8): 1390-1398. doi: 10.13700/j.bh.1001-5965.2021.0533 |
| 1. | 吕桂志,王鹏,李国红,陆峰,戴圣龙. 爬壁机器人动力学模型的模块化构建研究. 机械传动. 2024(11): 24-31 .  | |
| 2. | 王学军,张帆. 攀爬机器人动力学建模与分析. 机械科学与技术. 2023(01): 38-45 . | |
| 3. | 杨建邦,李梦阳,毛方海. 爬壁机器人全遍历路径规划方法. 中国新技术新产品. 2023(03): 12-14 . | |
| 4. | 吕志忠,汪维杰,陈金鹏,姚茂江,林清宽,张成维. 四足磁吸附爬壁机器人稳定性与动力学分析. 哈尔滨工程大学学报. 2022(03): 429-435 . | |
| 5. | 陆晓丹,张港. 爬壁机器人系统的广义Lagrange方程. 机械工程师. 2022(03): 4-8 . | |
| 6. | 刘佳,蔡文霞,孙宏强. 爬壁机器人解析动力学建模与仿真. 机械科学与技术. 2021(03): 371-376 . | |
| 7. | 郭明明,姚文莉. 基于修正Udwadia-Kalaba方法的刚体系统动力学模拟. 青岛理工大学学报. 2021(05): 131-139 . | |
| 8. | 贺利乐,黄天柱,刘小罗. 玻璃幕墙清洗机器人爬行机构动力学分析. 机械设计与制造. 2020(10): 265-269 . | |
| 9. | 吕桂志,刘荣. Udwadia-Kalaba方程构建操作臂名义模型的违约消除. 北京航空航天大学学报. 2018(11): 2305-2311 .  本站查看 本站查看 |

Figures(9)
Copyright © Journal of Beijing University of Aeronautics and Astronautics
Address: Editorial Department of Journal of Beijing University of Aeronautics and Astronautics, 37 Xueyuan Road, Haidian District, Beijing Post Code: 100191 Email: jbuaa@buaa.edu.cn
Supported by:
Beijing Renhe Information Technology Co., Ltd.

Ye Chuan, Ma Dongli. Dynamic modeling and stability analysis for underwater craft with wing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(9): 1137-1143. (in Chinese)





 DownLoad:
DownLoad: