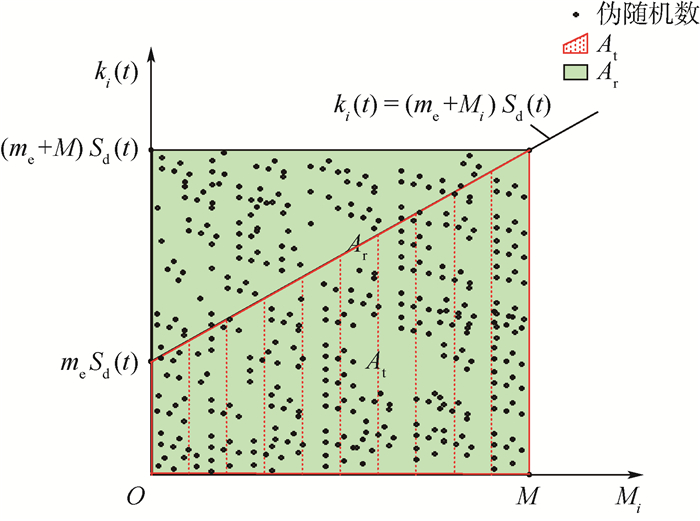
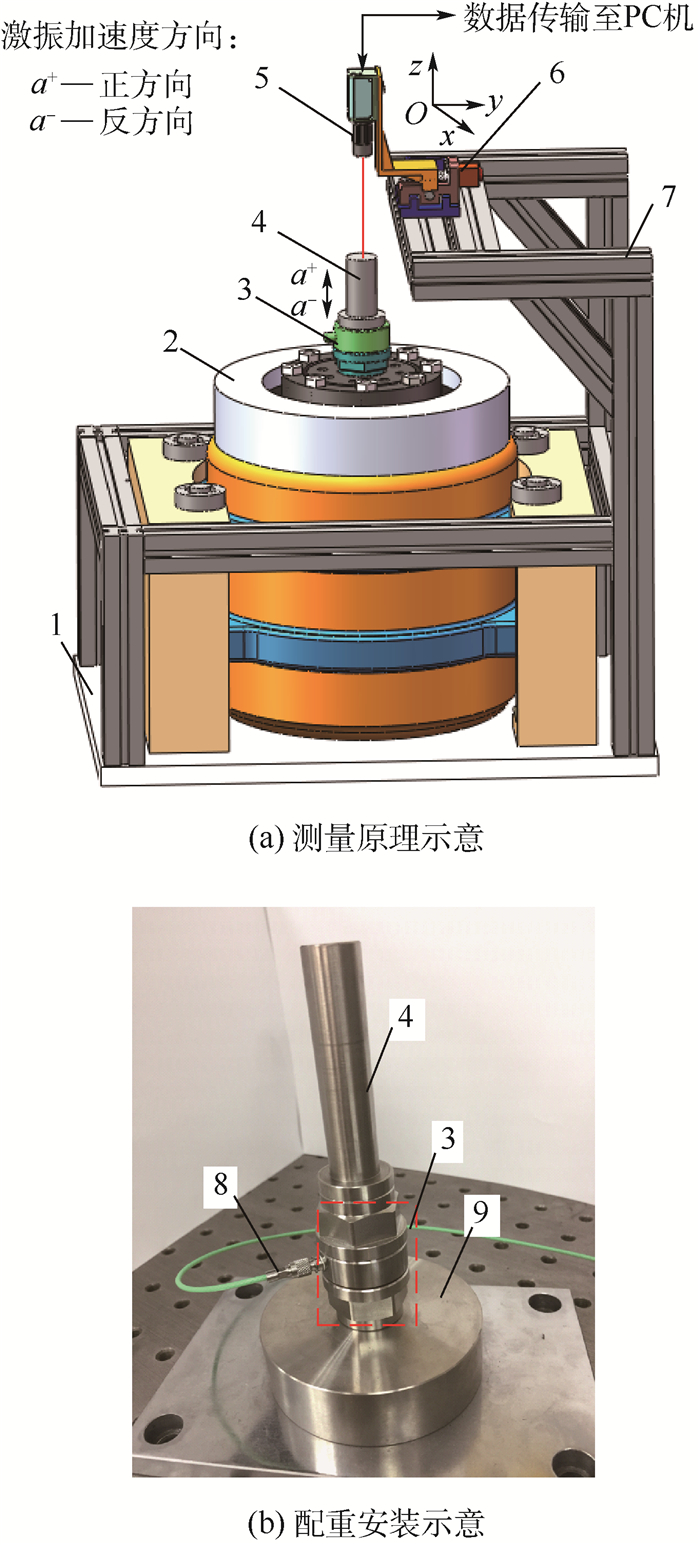
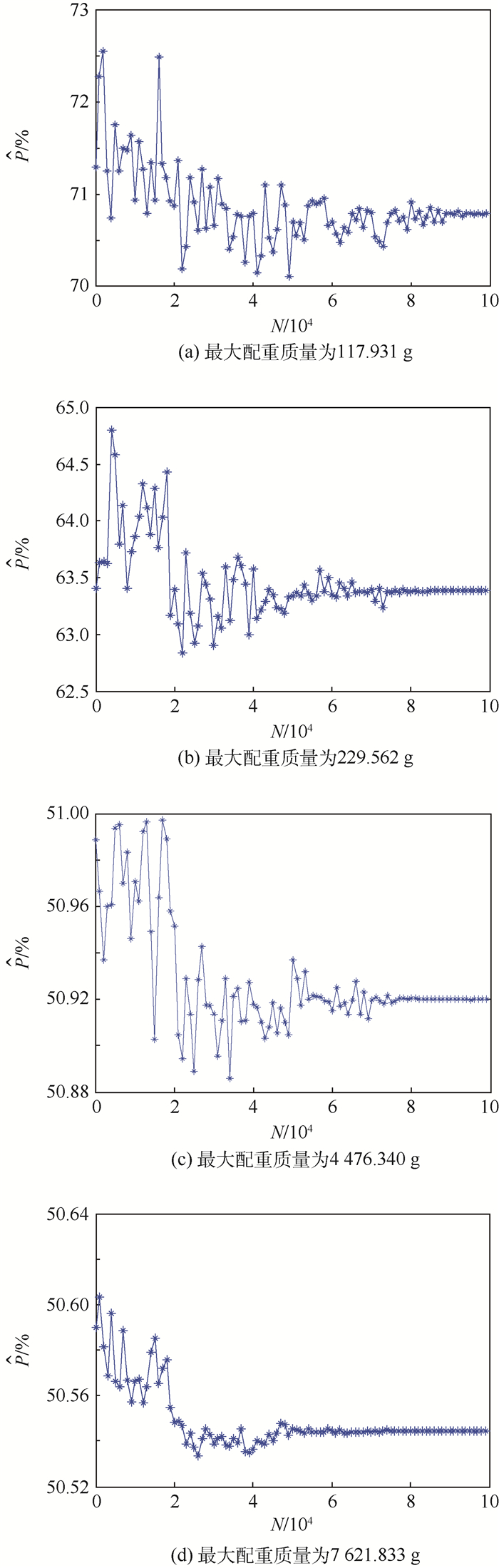
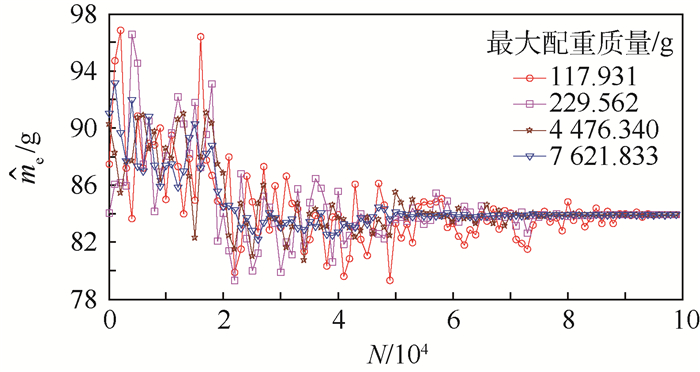
As an important parameter of a force transducer, the inertia mass can reduce the measurement accuracy of a dynamic force unless it has been accurately estimated. To eliminate the ill-posedness of an calibration model of the inertia mass caused by parameter errors, a modified Monte Carlo calibration (MMCC) method is proposed. Firstly, the mathematical model among the inertia mass, the additional mass, and the measurement response of the force transducer is built. Secondly, the parameter samples of this model including additional mass, acceleration, and voltage are simulated by pseudo-random number generation globally. Thirdly, the valid samples of these parameters are selected by interval screening technique. Finally, the inertia mass of the force transducer is estimated by solving the probability of these valid samples as well as the calibration of the force transducer. The accuracy of the MMCC method is verified by dynamic calibrating a Kistler 9331B force transducer with a sinusoidal vibration exciter. The experimental results show that the estimate of the inertia mass is 83.91g, the estimation error is 0.67%, the standard deviation is 0.74 g, and the calibration error range of the dynamic force is[-7.88%, 11.46%]. It indicates that the calibration error of MMCC method is less than the traditional secondary additional mass method and the multi-additional mass method.



 Download (80840)
Download (80840) 
 Views
Views  Cited by
Cited by 

























































































 XML Online Production Platform
XML Online Production Platform
