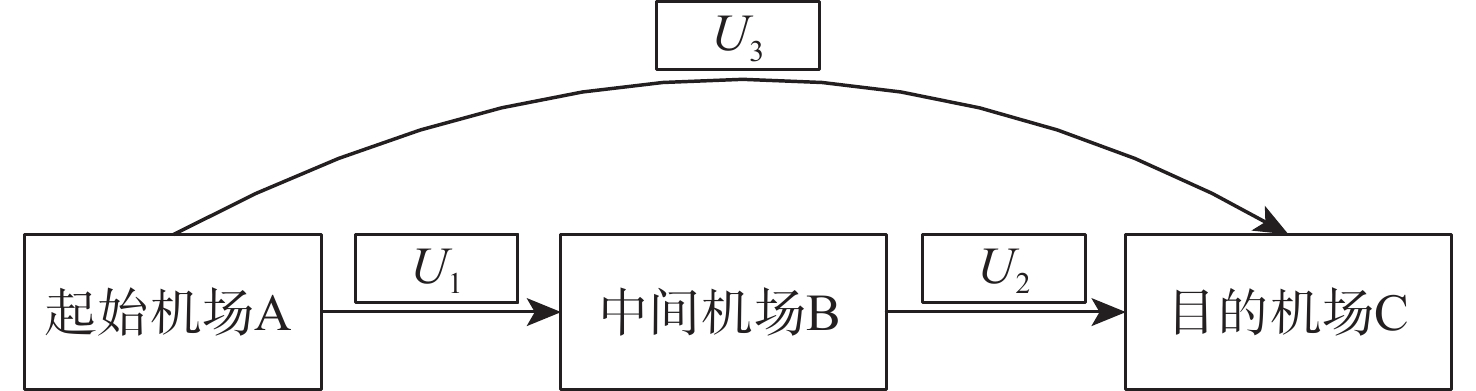
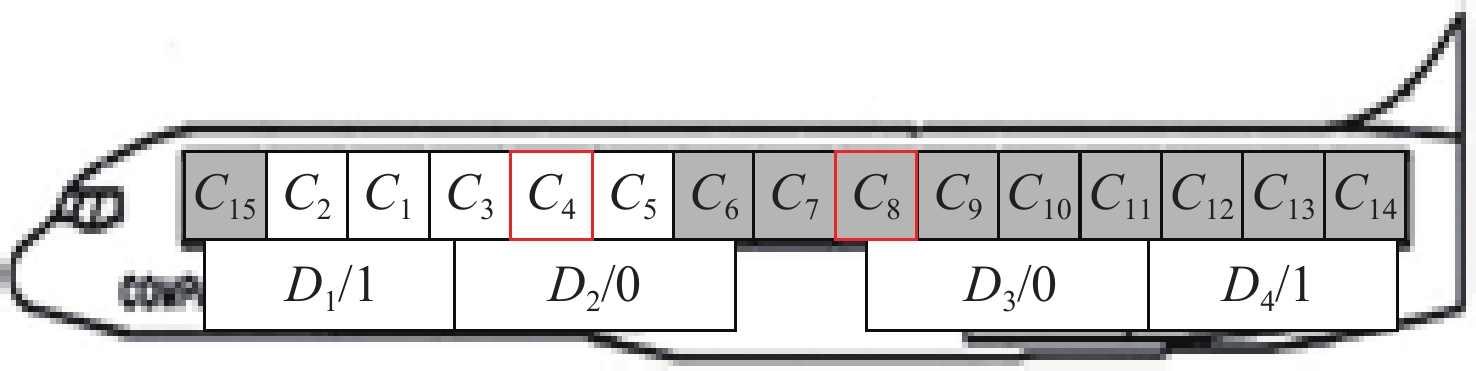
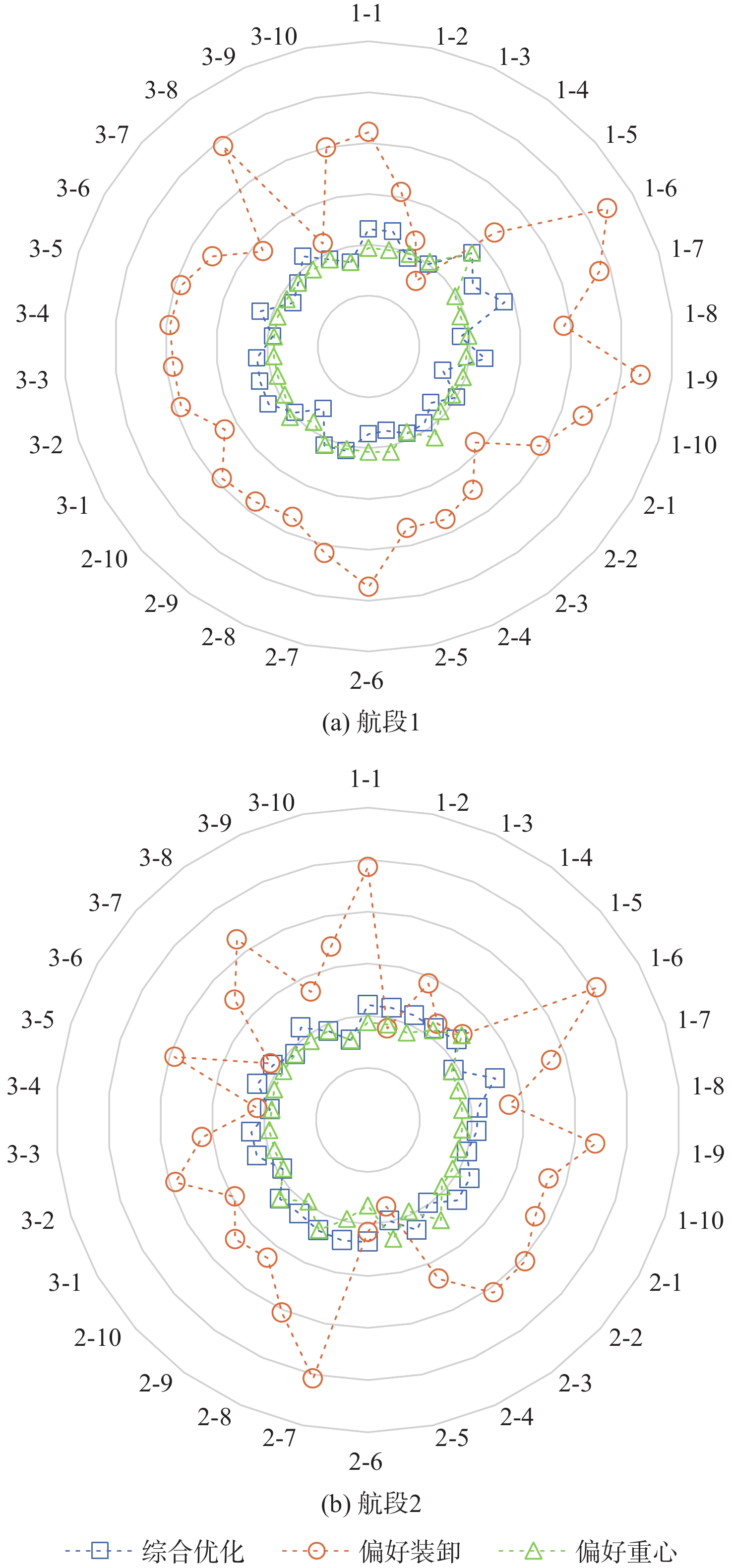
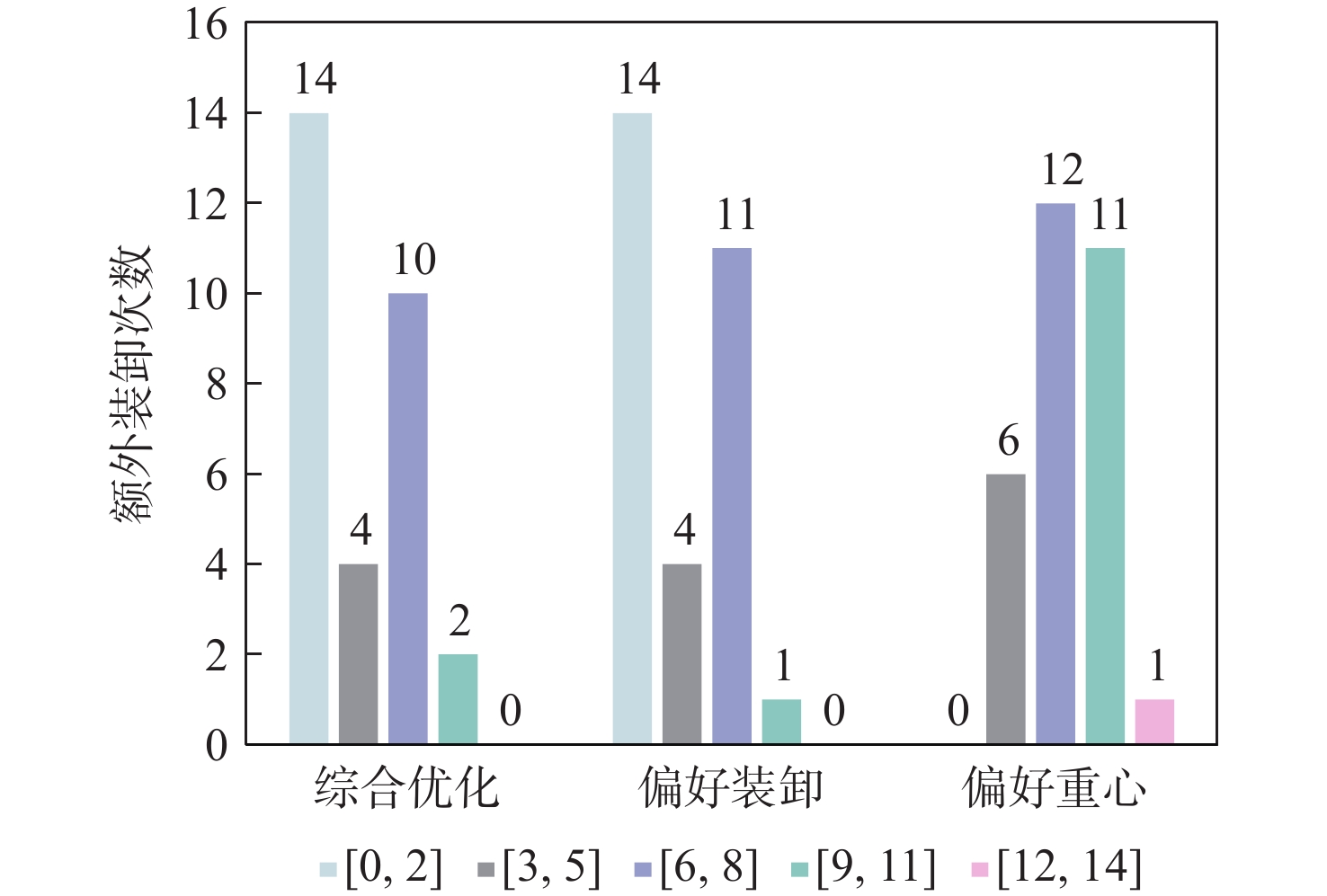
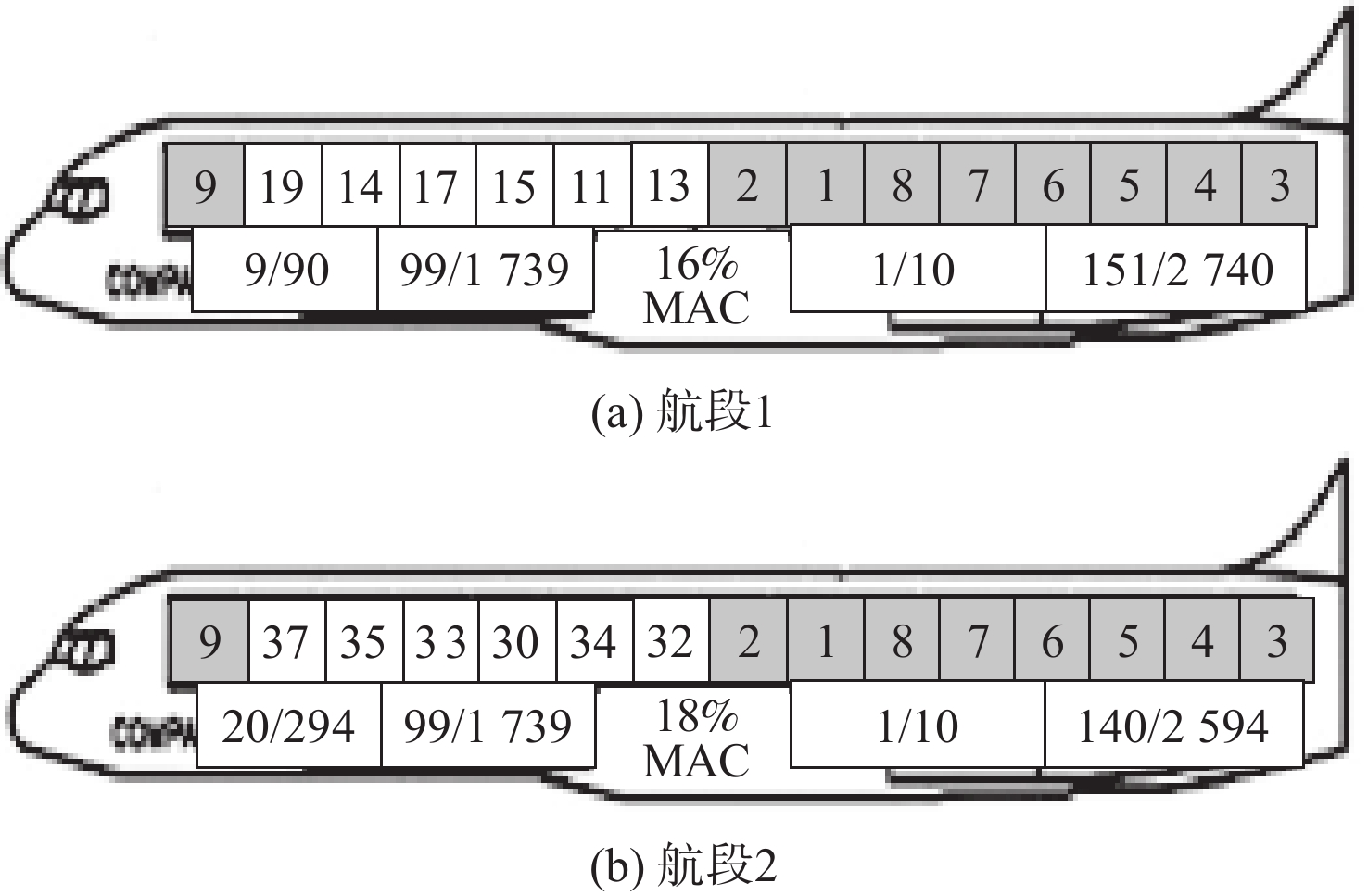
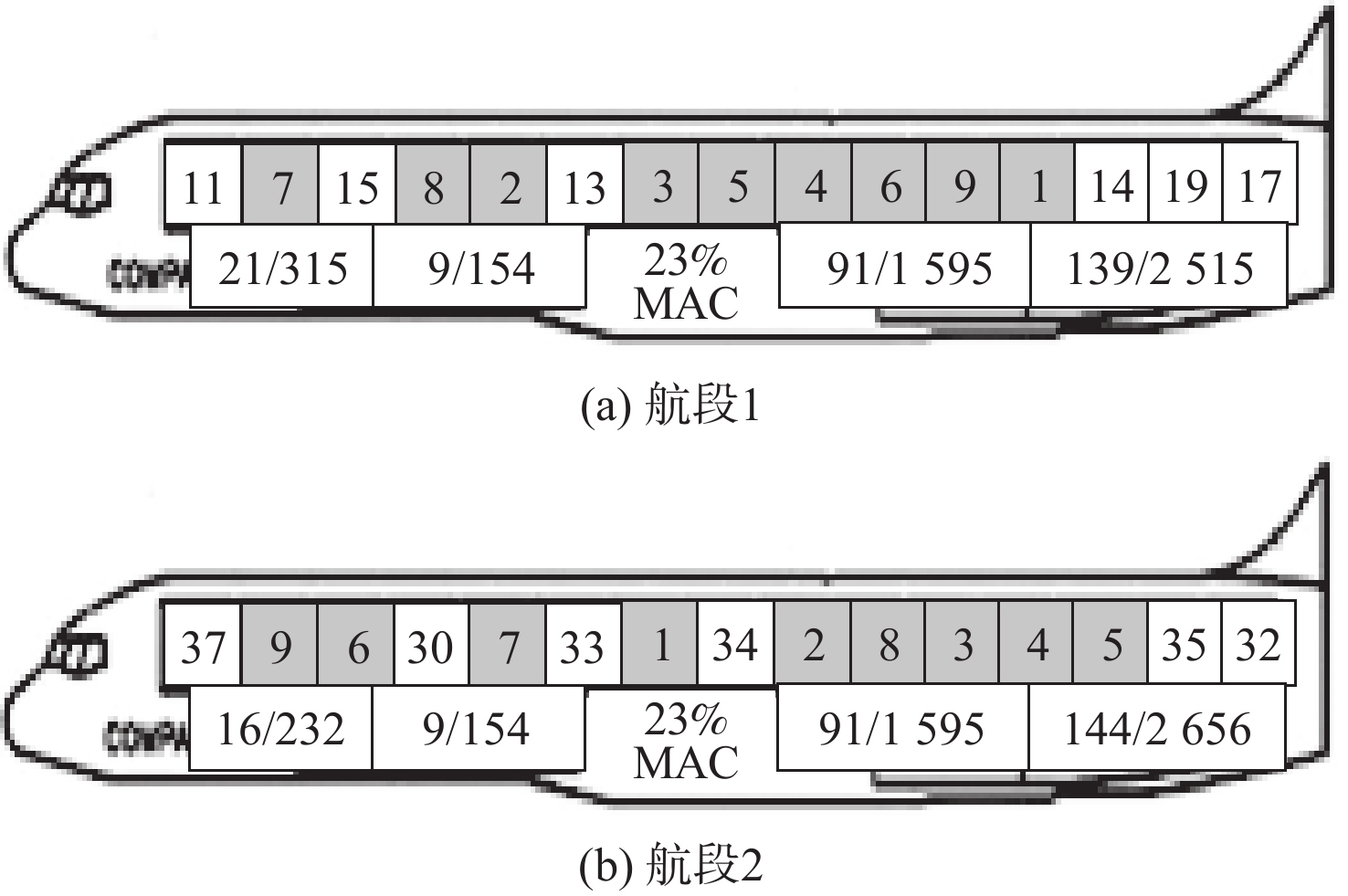
For air cargo flights with multiple legs and multiple stops, it is necessary to reasonably control the center of gravity (CG) position of the aircraft , and maintain a balanced state during the flight; during the loading and unloading operation at intermediate airports, it is important to avoid extra loading and unloading operations, so as to reduce waste of time and labor. Therefore, studying the cooperating loading balance problem of multiple flight legs flights was of great practical significance. In this paper, according to the aircraft’s characteristics and the sequence of unit load device (ULD) loading and unloading, and combined with the loading and unloading operation requirements for the aircraft loading balance in each flight leg and ULD in the over-station airport, a multi-objective integer linear programming model for connecting flights is constructed by cooperating and distributing the positions of ULD and bulk cargo in each flight leg. The model takes into account the weight, volume and matching restrictions of the ULD and bulk cargo. It considered the constraints of aircraft weight limitation, cabin weight limitation, cabin and regional cumulative weight limitation, upper and lower cabins combined weight limitation, and the CG location balance limit. Additionally, the model considers the connectivity constraints of ULD and bulk cargoes in the front and rear legs. According to the two reasons of the extra loading and unloading operation of the intermediate airports, and based on the loading and unloading sequence, the loading and unloading optimization model is established, the CG is optimized and the number of loading and unloading is reduced through the translation of the ULD in the cabin. Taking the B757-200F model as an example, the commercial solver Gurobi was used for the three scenarios of two loadings and one unloading, one loading and two unloadings and two loadings and two unloadings. For three different combinations of objective functions are solved, analyzed and compared. Experimental results show that the model can effectively cooperate and optimize additional loading and unloading operations and CG location of the front and rear legs.



 Download (78392)
Download (78392) 
 Views
Views  Cited by
Cited by 




































 XML Online Production Platform
XML Online Production Platform
